Terminals for sto, ss1 (time-controlled), sbc, Grouping drives (not for cu310) – Efficient Networks Siemens Sinamics S120 User Manual
Page 316
Safety Integrated basic functions
9.6 Control via terminals on the Control Unit and the power unit
Drive Functions
316
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
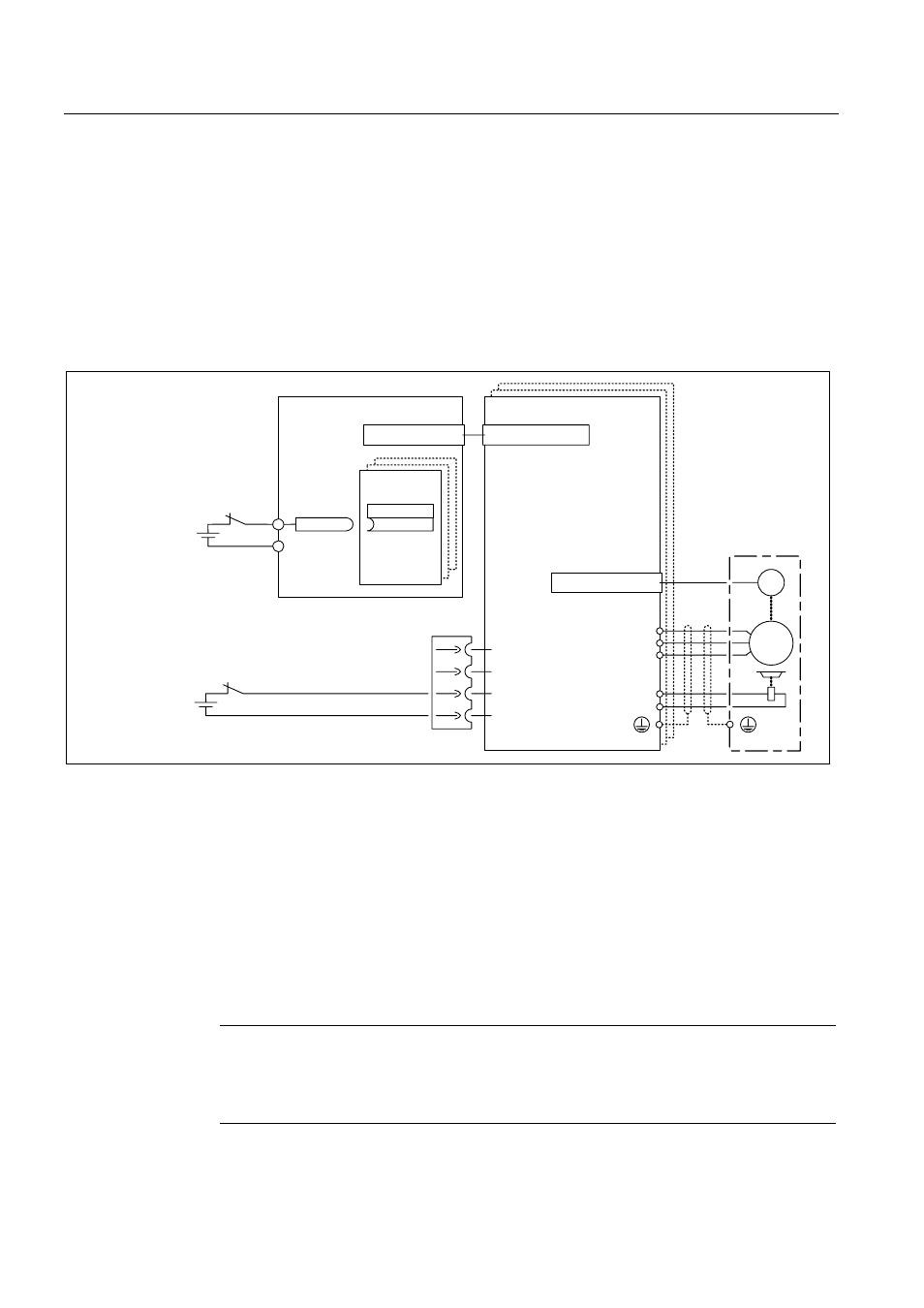
Terminals for STO, SS1 (time-controlled), SBC
The functions are separately selected/deselected for each drive using two terminals.
● 1. Switch-off signal path (CU310/CU320)
The desired input terminal is selected via BICO interconnection (BI: p9620[0]).
● 2. Switch-off signal path (Motor Module/Power Module/CUA31)
The input terminal is the "EP" ("Enable Pulses") terminal.
Both terminals must be operated simultaneously, otherwise a fault will be issued.
0RWRU0RGXOH
&RQWURO8QLWPRQLWRULQJFKDQQHO
0RWRU0RGXOHPRQLWRULQJFKDQQHO
[
;
*
0
a
[
;
%,
0
',[
%5
%5
9
8
(39
(30
;;
'5,9(&/L4
&RQWURO8QLW
7HPS
7HPS
:
'5,9(&/L4
'5,9(&/L4
U[
S
Figure 9-2
Terminals for "Safe Torque Off", example for Motor Modules Booksize and CU320
Grouping drives (not for CU310)
To ensure that the function works for more than one drive at the same time, the terminals for
the corresponding drives must be grouped together as follows:
● 1. Switch-off signal path (CU320)
By connecting the binector input to the joint input terminal on the drives in one group.
● 2. Switch-off signal path (Motor Module/CUA31)
By appropriately connecting-up the terminals for the individual Motor Modules/Power
Modules belonging to the group with CUA31.
Note
The grouping must be identical in both monitoring channels.
If a fault in a drive results in a "Safe Torque Off (STO)", this does not automatically mean
that the other drives in the same group also switch to "Safe Torque Off (STO)".