Functional principle, Function modules 7.10 dcc axial winder – Efficient Networks Siemens Sinamics S120 User Manual
Page 284
Function modules
7.10 DCC axial winder
Drive Functions
284
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
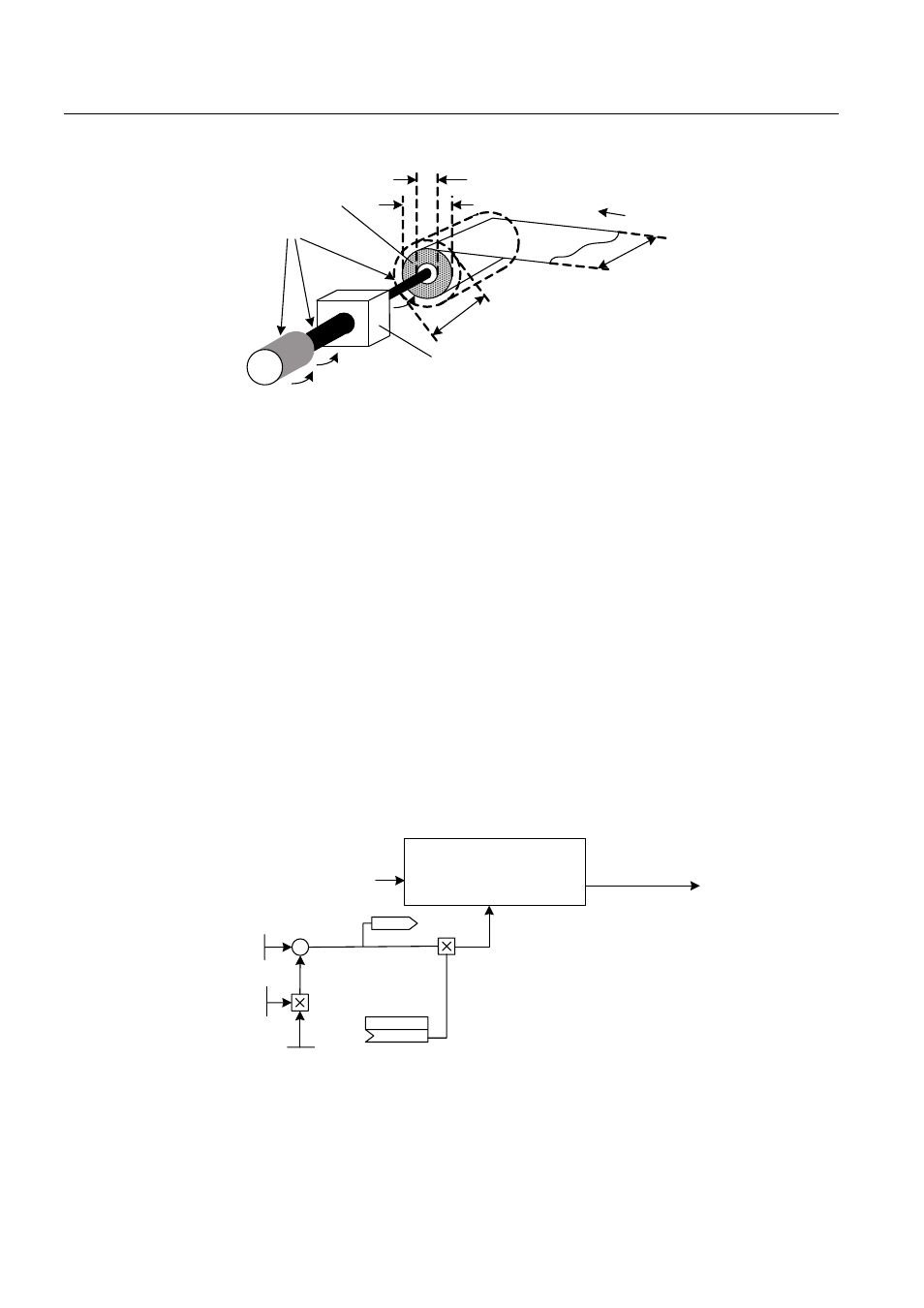
0DWHULDOGHQVLW\ 6FDOLQJ
)L[HGPRPHQWRILQHUWLD
0RWRUVSHHG
*HDUEORFN
*HDUUDWLR
0D[LPXPZLQGLQJ
GLDPHWHU
0RWRUVSHHG
:LQGHUVSHHG
$FFHOHUDWLRQWRUTXHPRWRUVLGH
&RUHGLDPHWHU
&XUUHQWGLDPHWHU
0DWHULDOYHORFLW\
0DWHULDOZLGWK
DMIN
DMAX
W
n
2
n
1
:
M
b
V
OFS
D
n
1
:
n
2
:
M
b
:
GF = n
1
/n
2
SCL
DEN
Figure 7-21 Axial winder setup
Functional principle
To maintain a constant tension of the continuous web, the drive moment is increased in a
linear manner while the winding diameter increases, or decreased while the winding
diameter decreases.
To protect the winding material during the winding process, the tension is reduced according
to a characteristic curve when the winding diameter increases.
The calculation of the continuously changing moment of inertia permits a torque pre-control
during a steady decrease or increase of the winder speed.
By using a sensor, a speed controlled operation of the winder is possible. The winder can be
operated without an encoder by controlling the tension moment, with two scaling parameters
p1552 and p1554 for tension moment limitation (see torque limitation).
Calculation of the moment of inertia for torque pre-control
The function diagram below shows the calculation flow for SERVO control with encoder [FP
5042] / without encoder [FP 5210]:
0RW0RP,QHUW5DWLR
>@
S
0RW0BLQHUWLD
>NJP@
S
$FFHOHUDWLRQFDOFXODWLRQ
6HUYRZLWKHQFRGHU>@
6HUYRZLWKRXWHQFRGHU>@
0BSUHFRQWUROB
>@
/RDGPRP
RILQHUWLD
>NJP@
S
r1493
p1497
1
+
+
dn/dt
Figure 7-22 Torque pre-control for SERVO control