Efficient Networks Siemens Sinamics S120 User Manual
Page 120
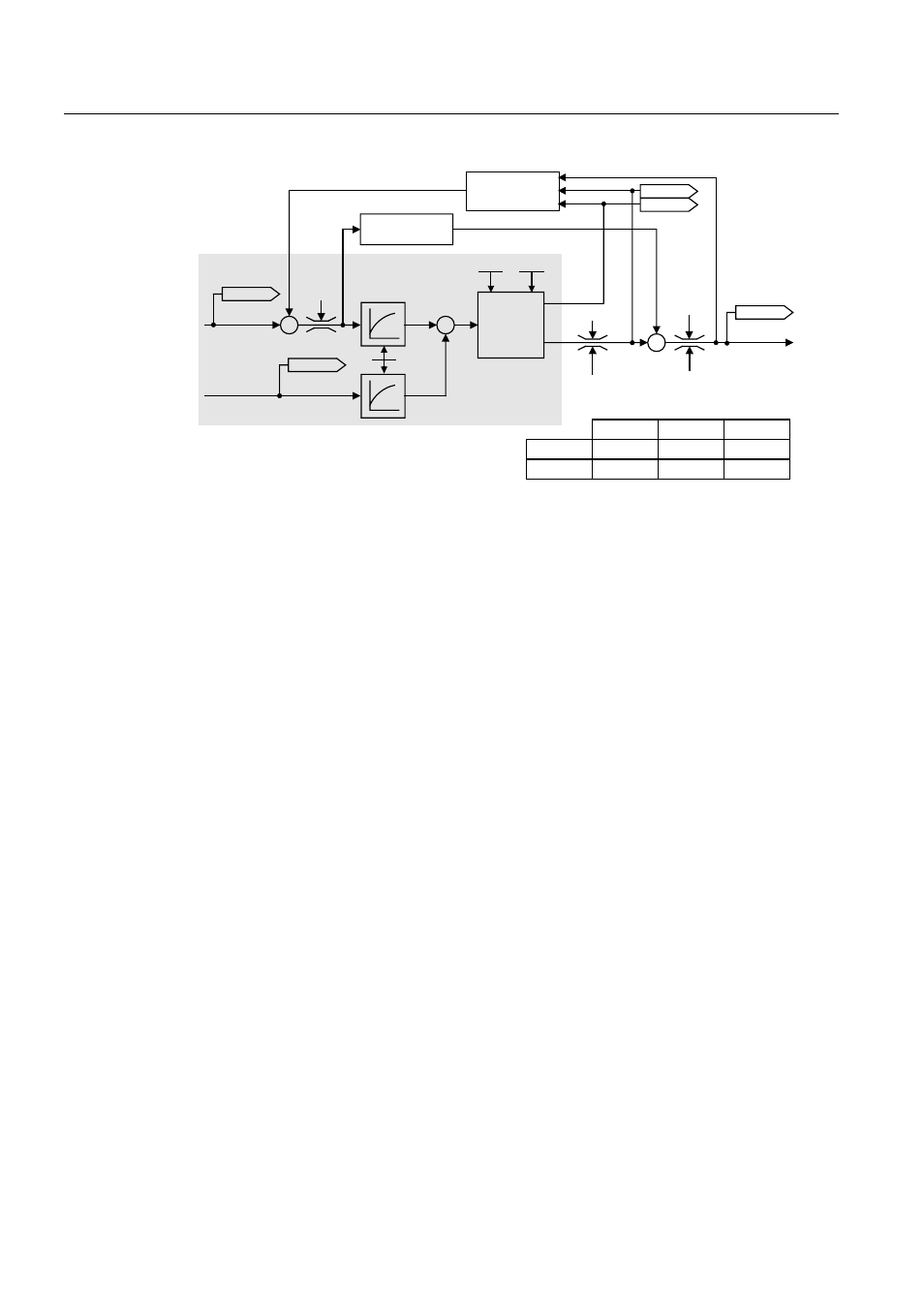
Vector control
4.3 Speed controller
Drive Functions
120
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
RQO\DFWLYHLISUHFRQWUROLVDFWLYH
S!
6SHHGDFWXDOYDOXH
6SHHGVHWSRLQW
6SHHG
FRQWURO
3UH
FRQWURO
3,
6SHHG
FRQWUROOHU
7RUTXH
VHWSRLQW
'URRS
LQMHFWLRQ
9&
L
7
S
.
Q
7
L
7
S
.
Q
7
U>@
U
U>@
U
S
S
S
U
U
U
U
U
U
S
S
S
6/9&
Figure 4-4
Speed controller
The optimum speed controller setting can be determined via the automatic speed controller
optimization function (p1900 = 1, rotating measurement).
If the inertia load has been specified, the speed controller (Kp, Tn) can be calculated by
means of automatic parameterization (p0340 = 4). The controller parameters are defined in
accordance with the symmetrical optimum as follows:
Tn = 4 * Ts
Kp = 0.5 * r0345 / Ts = 2 * r0345 / Tn
Ts = total of the short delay times (contains p1442 and p1452)
If vibrations occur with these settings, the speed controller gain Kp must be reduced
manually. Actual-speed-value smoothing can also be increased (standard procedure for
gearless or high-frequency torsion vibrations) and the controller calculation performed again
because this value is also used to calculate Kp and Tn.
The following relationships apply for optimization:
● If Kp is increased, the controller becomes faster, although overshoot is reduced. Signal
ripples and vibrations in the speed control loop, however, increase.
● If Tn is decreased, the controller still becomes faster, although overshoot is increased.
When speed control is set manually, it is easiest to define the possible dynamic response via
Kp (and actual speed value smoothing) first before reducing the integral time as much as
possible. When doing so, closed-loop control must also remain stable in the field-weakening
range.
To suppress any vibrations that occur in the speed controller, it is usually only necessary to
increase the smoothing time in p1452 for operation with an encoder or p1442 for operation
without an encoder or reduce the controller gain.
The integral output of the speed controller can be monitored via r1482 and the limited
controller output via r1508 (torque setpoint).