Efficient Networks Siemens Sinamics S120 User Manual
Page 182
Basic functions
6.2 Reference parameters/normalizations
Drive Functions
182
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
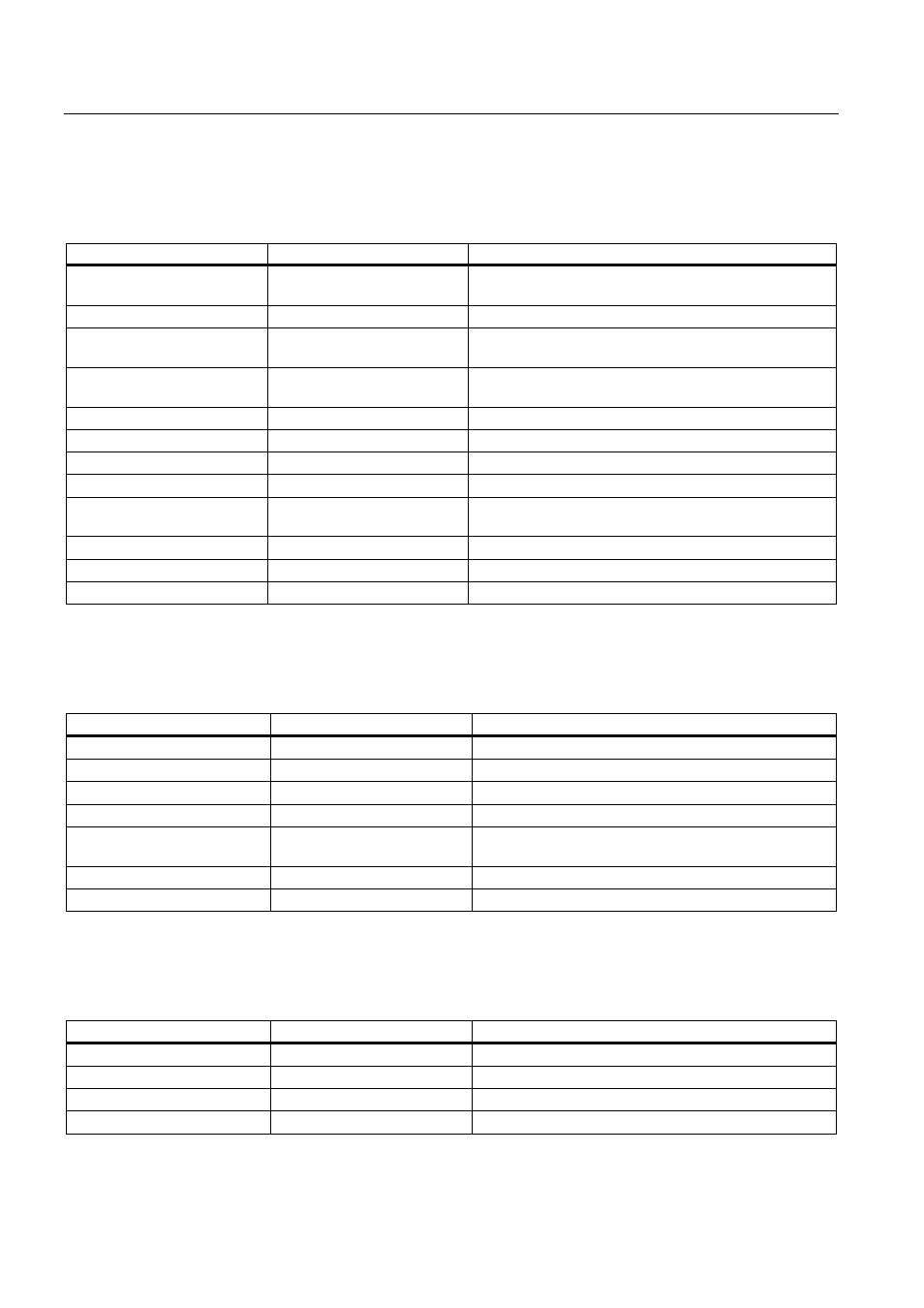
Scaling for servo object
Table 6-2
Scaling for servo object
Size
Scaling parameter
Default at initial commissioning
Reference speed
100 % = p2000
Induction motor p2000 = Maximum motor speed (p0322)
Synchronous motor p2000 = Rated motor speed (p0311)
Reference voltage
100 % = p2001
p2001 = 1000 V
Reference current
100 % = p2002
p2002 = Motor limit current (p0338); when p0338 = "0", 2
* rated motor current (p0305)
Reference torque
100 % = p2003
p2003 = p0338 * p0334; when "0", 2 * rated motor torque
(p0333)
Reference power
100 % = r2004
r2004 = p2003 * p2000 * π / 30
Reference angle
100% = p2005
90°
Reference acceleration
100% = p2007
0.01 1/s
2
Reference frequency
100 % = p2000/60
-
Reference modulation depth
100 % = Maximum output
voltage without overload
-
Reference flux
100 % = Rated motor flux
-
Reference temperature
100% = 100°C
-
Reference electrical angle
100 % = 90°
-
Scaling for object A_Inf
Table 6-3
Scaling for object A_Inf
Size
Scaling parameter
Default at initial commissioning
Reference frequency
100 % = p2000
p2000 = p0211
Reference voltage
100 % = p2001
p2001 = r0206/r0207
Reference current
100 % = p2002
p2002 = p0207
Reference power
100 % = r2004
r2004 = p0206
Reference modulation depth
100 % = Maximum output
voltage without overload
-
Reference temperature
100% = 100°C
-
Reference electrical angle
100 % = 90°
-
Scaling for object B_Inf
Table 6-4
Scaling for object B_Inf
Size
Scaling parameter
Default at initial commissioning
Reference frequency
100 % = p2000
P2000 = 50
Reference voltage
100 % = p2001
p2001 = r0206/r0207
Reference current
100 % = p2002
p2002 = p0207
Reference power
100 % = r2004
r2004 = p0206