4 monitoring functions – Efficient Networks Siemens Sinamics S120 User Manual
Page 247
Function modules
7.8 Closed-loop position control
Drive Functions
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
247
7.8.4
Monitoring functions
Features
● Standstill monitoring (p2542, p2543)
● Positioning monitoring (p2544, p2545)
● Dynamic following error monitoring (p2546, r2563)
● Cam controllers (p2547, p2548, p2683.8, p2683.9)
Description
S
S
S
S
U
6HWSRLQW
$FWXDOYDOXH
3RVLWLRQUHDFKHG
6WDQGVWLOOPRQLWRULQJWLPH
6WDQGVWLOOZLQGRZ
3RVLWLRQLQJZLQGRZ
3RVLWLRQPRQLWRULQJWLPH
ෙ6
6WDQGVWLOO
ෙW
6WDQGVWLOO
ෙW
,WHP
ෙ6
,WHP
V
W
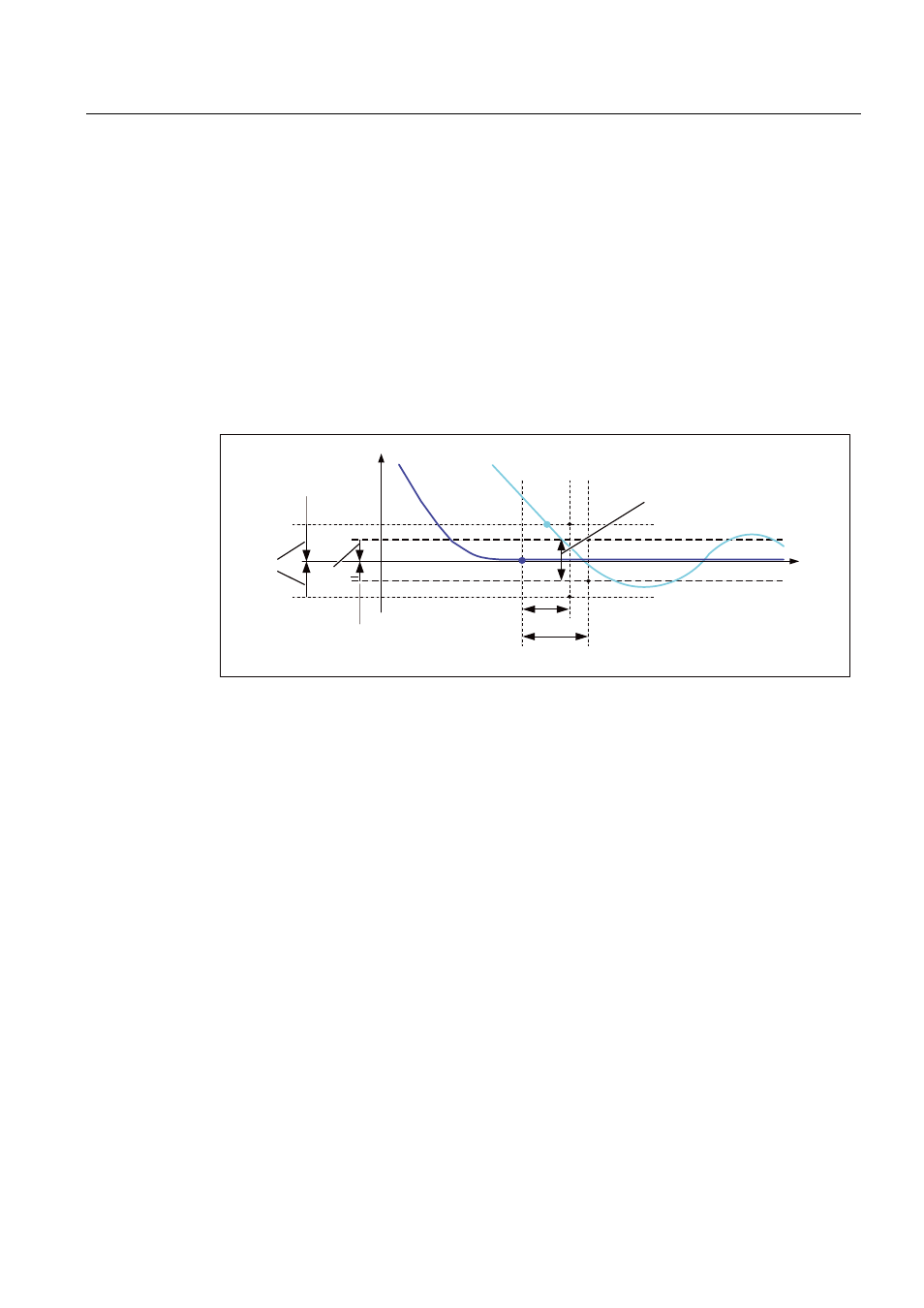
Figure 7-11 Zero-speed monitoring, positioning window
The position controller monitors the standstill, positioning and following error.
Zero-speed monitoring is activated by binector inputs p2551 (setpoint stationary) and p2542
(zero-speed window). If the zero-speed window is not reached once the monitoring time
(p2543) has lapsed, fault F07450 is triggered.
Positioning monitoring is activated via binector inputs p2551 (setpoint stationary), p2554 =
"0" (travel command not active) and p2544 (positioning window). Once the monitoring time
(p2545) has elapsed, the positioning window is checked once. If this is not reached, fault
F07451 is triggered.
The standstill monitoring and the positioning monitoring can be de-activated using the value
"0" in p2542 and p2544. The standstill window should be greater than or equal to the
positioning window (p2542 ≥ p2544). The standstill monitoring time should be less than or
equal to the positioning monitoring time (p2543 ≤ p2545).