Speed corrections, Winding bemf shape correction, 1 winding bemf shape correction – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 300
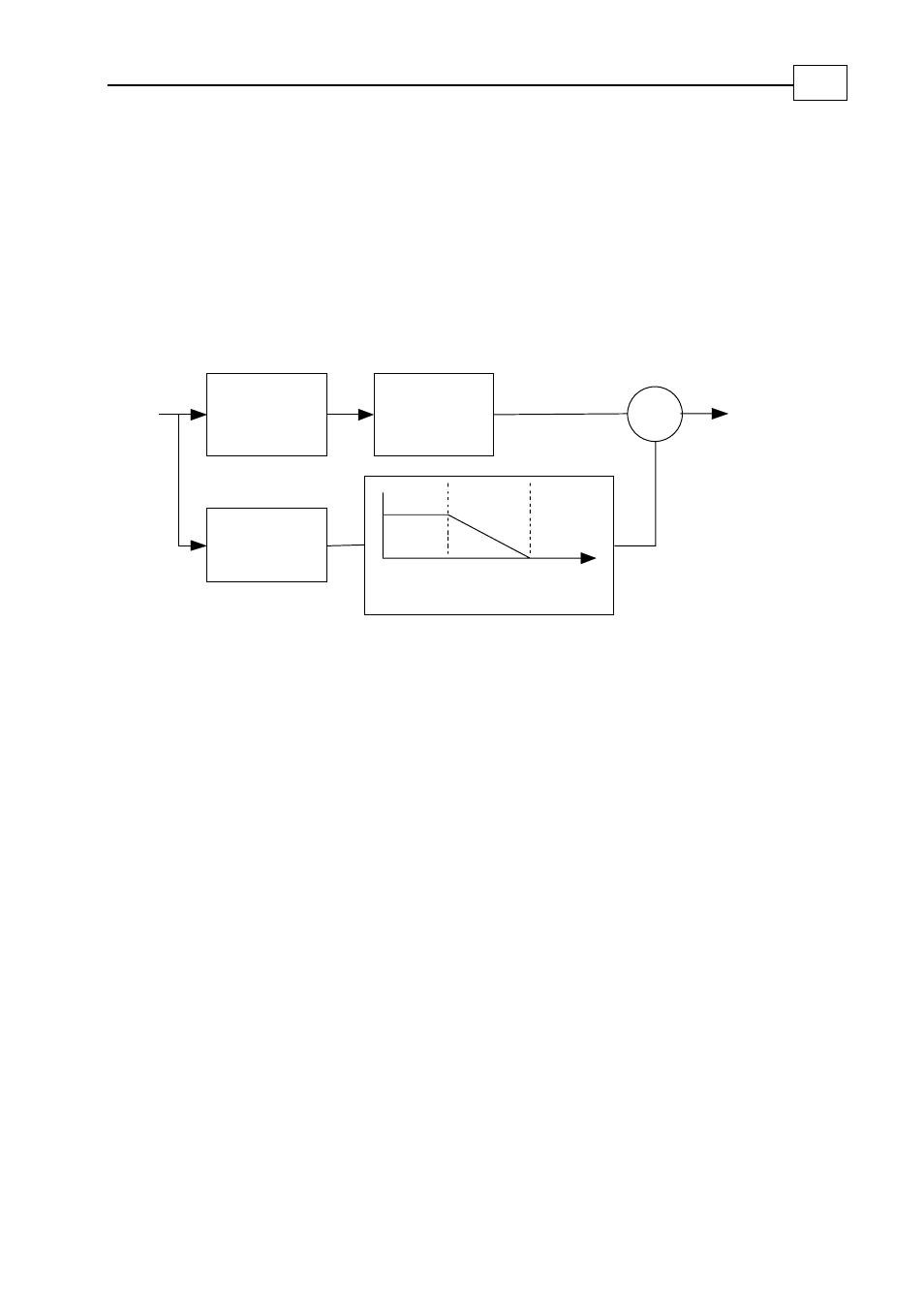
Because of the cogging, motor motion may be unsmooth. The cogging correction
function automatically generates torque additions that compensate for the cogging
torque.
Cogging correction works very well at slow speeds. At high speeds, cogging becomes
a high frequency disturbance. On the one hand, cogging correction becomes less
important because the high frequency less disturbs motion; on the other hand, the
correction becomes less efficient due to the limitations of the current amplifier.
Field
angle
Predictor for current
loop delay compensation
[3]
e
PF
s
−
Lookup
table
/
d dt
1
PF[4]
PF[5]
ω
Cogging
correction
torque
×
Speed dependent gain
Figure 21: Cogging correction scheme
Therefore,
SimplIQ
uses the cogging correction scheme above in order to apply
cogging correction at reasonable speeds, reducing the correction as speed increases.
The cogging correction may be enabled and disabled as a whole, using the parameter
PN[2].
9.3. Speed
Corrections
The
SimplIQ
is a full vector drive. It compensates for the following disturbances:
- Winding BEMF shape.
- Voltage required for driving the motor inductance.
All the speed corrections may be disabled or enabled as a whole using the parameter
PN[3].
9.3.1
Winding BEMF Shape Correction
The BEMF model serves the following purposes:
- Current scale corrections, in order to minimize ripple torques.
- Winding shape correction, for better current control in the presence of EMF.
SimplIQ for Steppers Application Note
The Current Controller
MAN-STECR (Ver. 1.1)
101