Follower, 1 follower – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 267
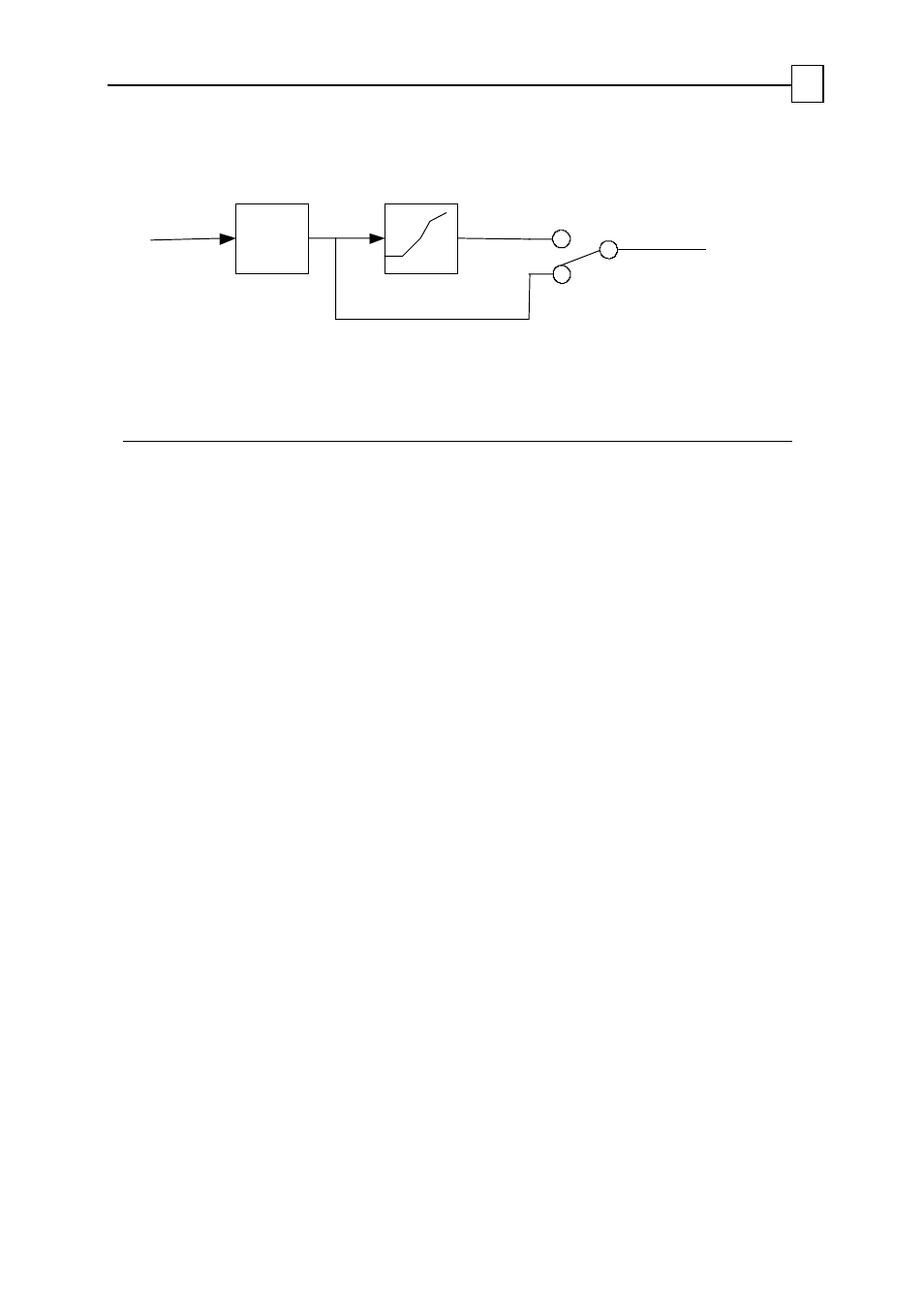
FR[3]
Auxiliary
Encoder
input
ECAM table
EM[1]=0
EM[1]>0
DV[6]
Auxiliary
position
demand
Figure 6-10: External Position Reference Generator
The following parameters determine the composition of the position reference:
Parameter Action
FR[3]
Scale the auxiliary encoder input. Applicable only if the auxiliary
encoder is not used for position feedback.
EM[1]
Define whether the ECAM table transforms the external reference:
EM[1]=0: Do not use ECAM table.
EM[1]=1: Use linear ECAM table to transform external command.
EM[1]=2: Use cyclical ECAM table to transform external command.
RM
Define whether an external reference is used:
RM=0: Do not use external reference.
RM=1: Use external reference.
DV[6]
Reads the external position reference.
Table 6-14: Position Reference Parameters
6.2.1 Follower
In Follower mode (RM=1, EM[1]=0), the external speed command tracks the auxiliary
encoder speed at a ratio of FR[3], as depicted in
. In this figure, the auxiliary
encoder counts the PY modulo in the range [0…500]. The derived external position
reference advances at the same rate as the auxiliary encoder while FR[3]=1. Jumps in PY
due to the modulo count are not reflected in auxiliary position reference DV[6]. When
FR[3] changes to 2, DV[6] advances at twice the speed of PY.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
68