Ecam, 2 ecam – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 269
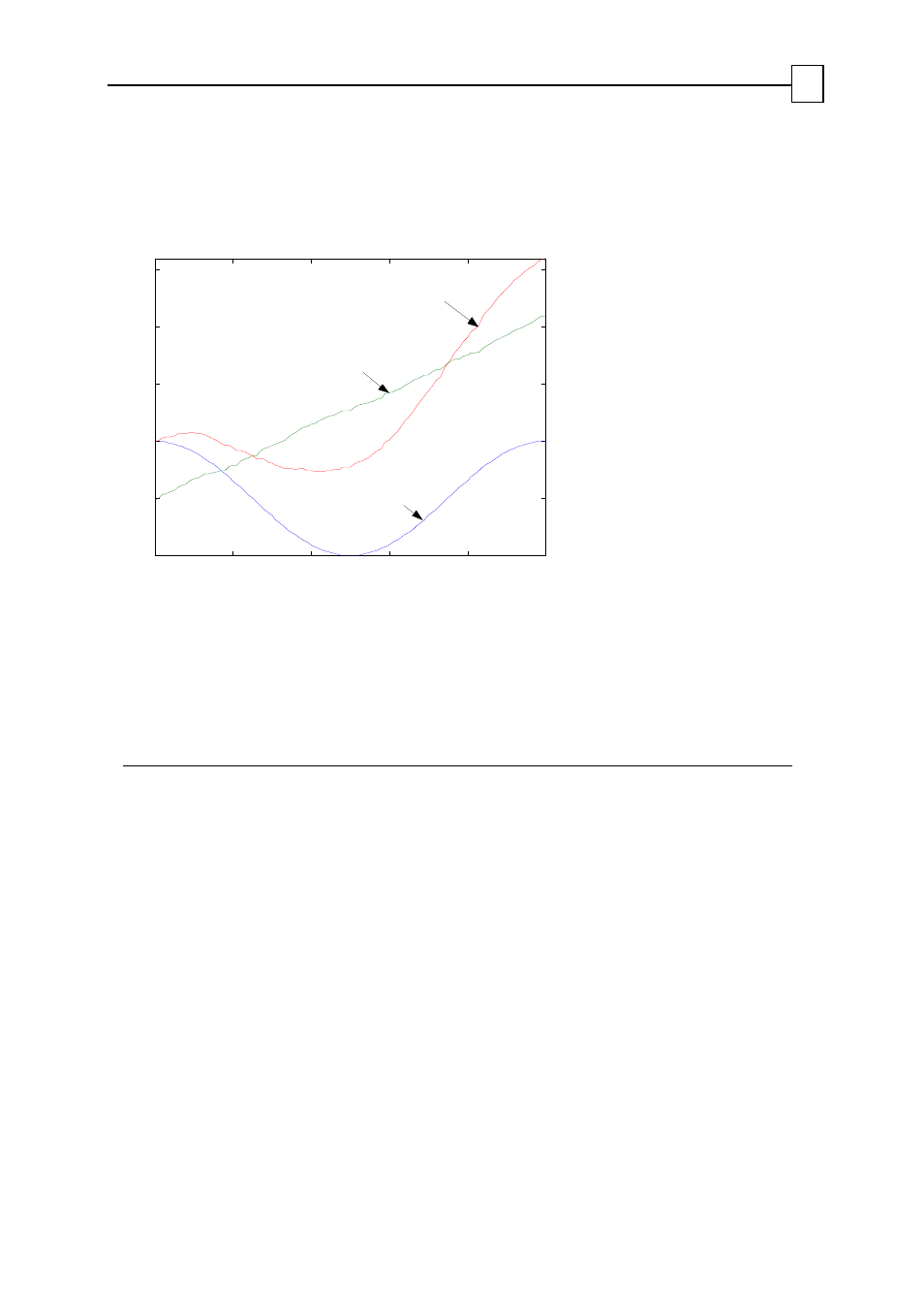
Suppose that the resolution of the conveyor encoder is similar to the resolution of the
x-axis encoder. To draw an exact circle on the moving cake, the motion 10,000 * cos(2
πt) is
programmed as PVT and RM=1, FR[3]=1.
0
0.2
0.4
0.6
0.8
1
-1
0
1
2
3
4
x 10
4
x motion
relative to cake
C onveyer position, as measured
by the auxiliary encoder input
x motor motion command
Time (sec)
6.2.2 ECAM
ECAM is an acronym for electronic CAM, in which the position reference to the drive is
not directly proportional to the total external inputs, but is rather a function of them.
The ECAM-related commands are as follows:
Commands Action
EM[1]
Indicates whether the ECAM function is active:
2: ECAM is cyclical.
1: ECAM is linear.
0: Direct external referencing.
Set EM[1] to synchronously activate the most recent settings of
EM[2], EM[3], EM[4], EM[5] and EM[7].
EM[2]
Last valid index of ECAM table. Maximum for EM[2] is 1024.
The EM[2] setting goes into effect only at next setting of EM[1] or
next MO=1.
EM[3]
Starting position: value of the input to the ECAM function for which
the output of the ECAM function will be ET[EM[5]] (ET of EM[5]).
If EM[3] is out of range for PY, it will be taken modulo PY.
EM[4]
Table difference (see
sections
The EM[2] setting goes into effect at next setting of EM[4] or next
MO=1.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
70