ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 274
Example:
In the previous example of the chocolate bear, it was assumed that the bear drawing
could be programmed one time only. In many food applications, however, the products
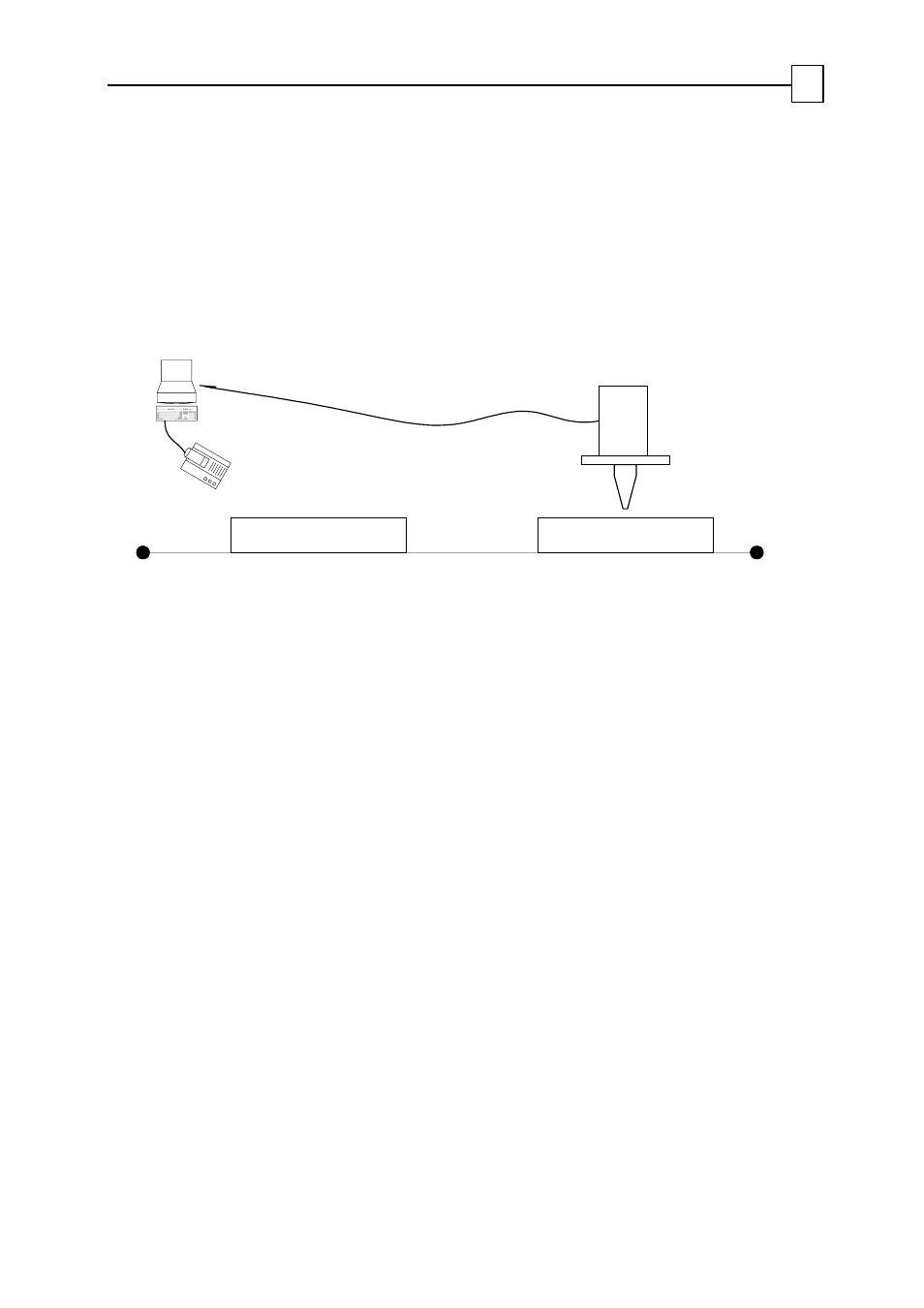
to be worked on (the cake in the example) are not placed precisely on the conveyor or
their shapes may be irregular. A camera images the next coming product and the image
is analyzed to form the next motion path. The motion path for the analyzed image is
communicated to the drive by the system controller while the drive works on a
previously-programmed path, as depicted in the following figure:
Cake
Drawing x-y m anipulator
station
Next cake
Cam era station
CAN
Cam era
Assume that the drive at the x-y manipulator station runs ECAM table entries
ET[1]…ET[100]. In the meantime, the system controller programs the next shape to run
ET[101]…ET[200]. The preferred method to achieve this is to use the fast CAN ECAM
points protocol. While the x-y manipulator works on ECAM table entries
ET[101]…ET[2000], the system controller programs ET[1]…ET[100] again, and so on.
The AUTO_RLS program of the previous example is now slightly modified to:
function AUTO_I1
DIN#1 has operated an already-programmed HY
homing process to synchronize the following input.
EM[5]=1 + NextSegment * 100; EM[2]=100 * (1 + NextSegment);
EM[1]=1…OB[1]=1; FR=1;
The system controller manipulates the user program
variable NextSegment to signal which part of the table
to use next. The AUTO_I1 line selects the ECAM table
portion to use by NextSegment, and then sets EM[1]=1
to activate the new used portion, activating the follower
gain and the chocolate flow.
until (PY >= 2000)
Wait until end of head contour.
…
Continue as in previous example.
return
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
75