ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 280
0
0.5
1
1.5
2
2.5
3
-8
-6
-4
-2
0
2
4
6
8
x 10
4
S ec
C
o
unt
s
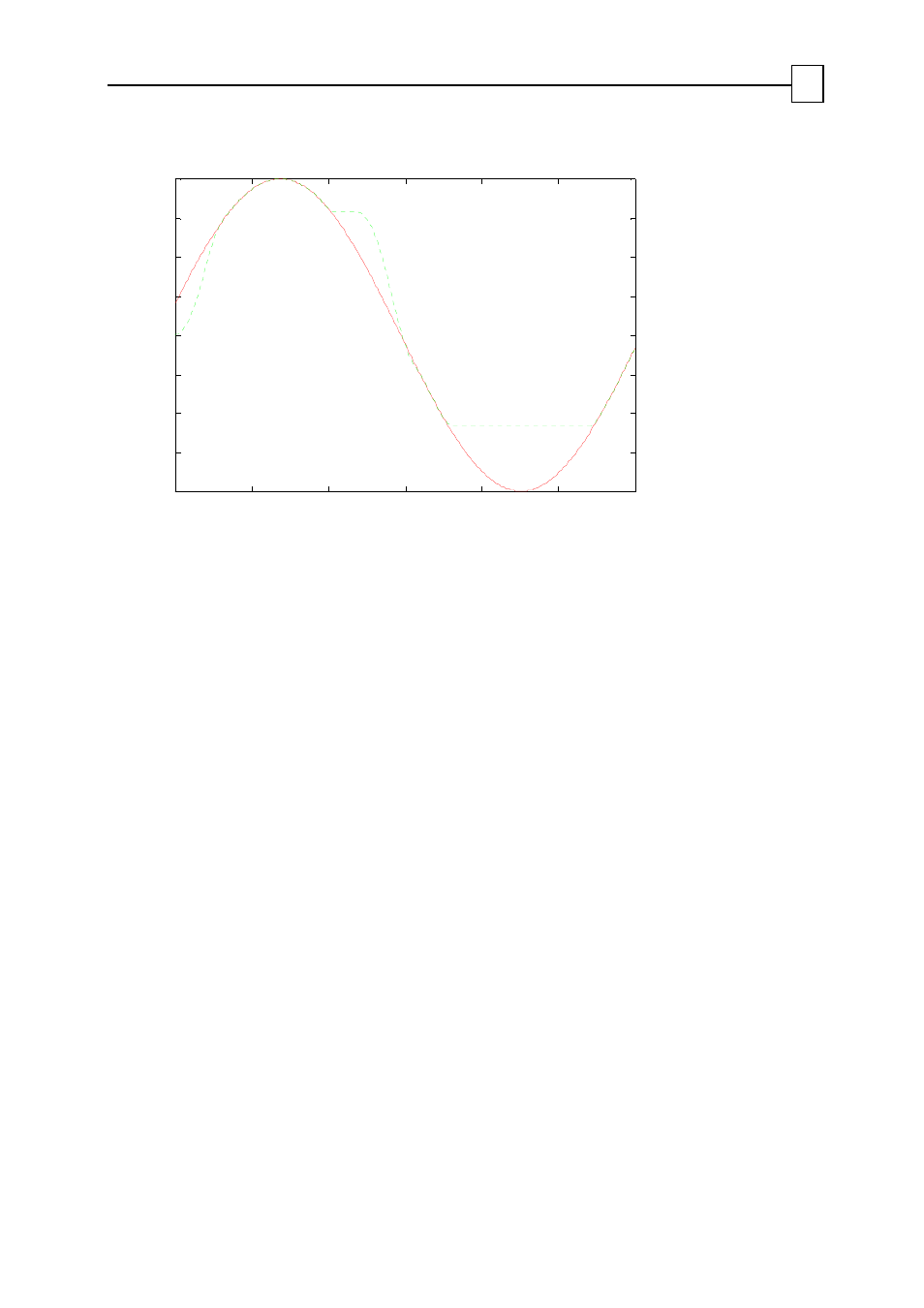
Figure 6-15: Position Output of the Stop Manager
The input of the stop manager (the output of the position reference generator) is the red
solid line, and the output of the stop manager is the green dashed line. At the time of 0, the
PVT starts at position 17,000. The stop manager catches up with the sinusoidal command,
with an acceleration limit of SD. At the time of 1 second, a Hard Stop switch becomes active
and remains active until the time of 1.2 seconds. The stop manager decelerates the position
command to zero speed, using the SD deceleration. At the time of 1.2 seconds, the stop
manager begins to catch up again with the PVT reference, at SD acceleration.
At the time of approximately 1.7 seconds, the PVT reference nears the limit of
VL[3]= -5000. Before the reference waveform actually reaches -5000, the stop manager finds
that the speed is too great for stopping at VL[3] with a deceleration of SD. It therefore
reduces the speed, coming to a complete stop at VL[3] with very small or no overshoot.
At approximately 2.75 seconds, the stop manager finds that although the position reference
is not yet in range, it will be, in a short time. The stop manager begins to accelerate the motor
into the permitted range so that catching up when the reference returns to range will be
immediate, without the delay of acceleration.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
81