Pn[n] –integer parameters – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 138
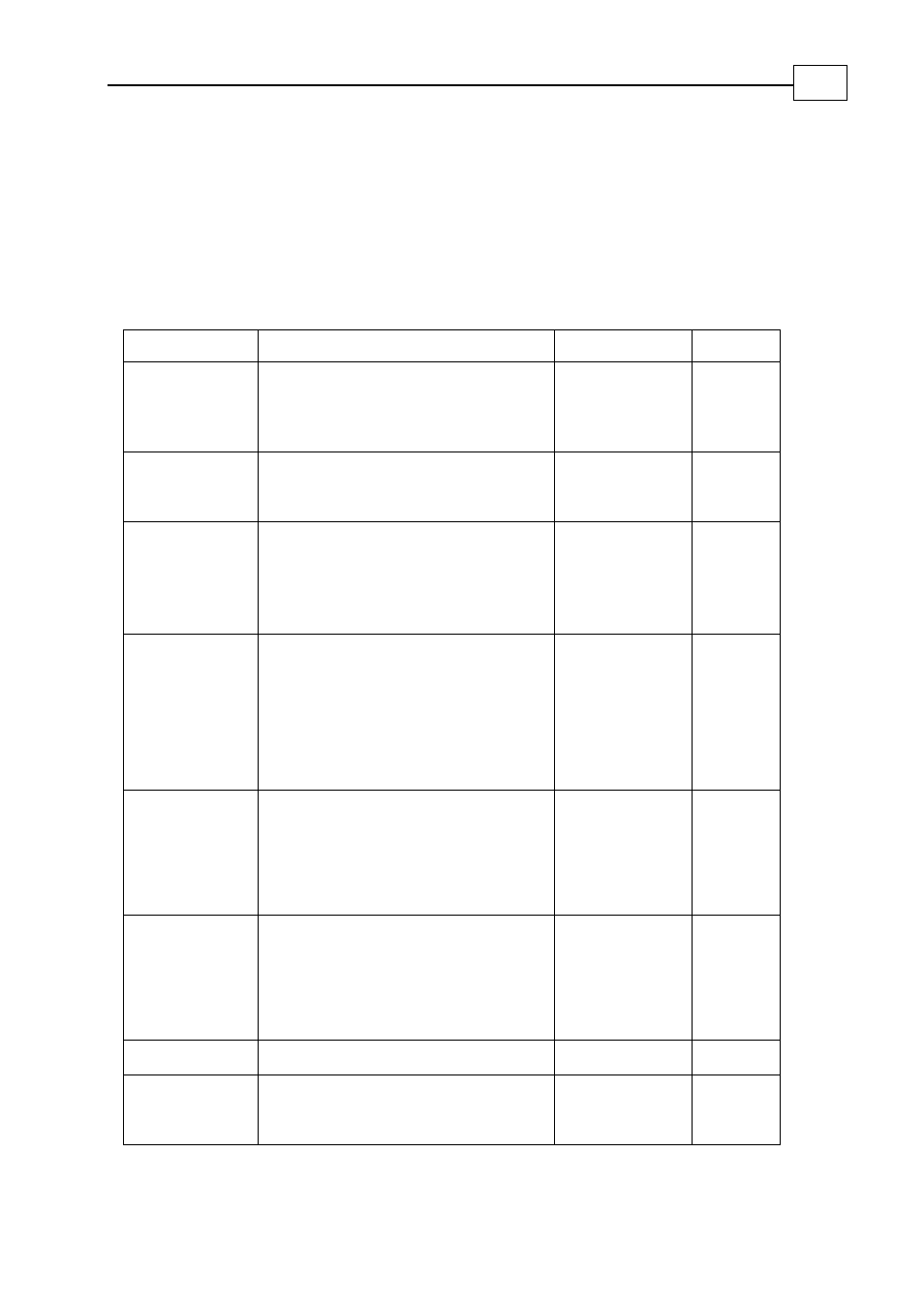
PN[N] –Integer parameters
Purpose:
This parameter vector is used for device data, which is normally entered by the tuning
environment. The user is encouraged to use the tuning environment instead of
entering these parameters manually.
Parameter Description
Units
[range] Default
PN[1]
Maximum amount of Hall sensor
misses before exception emits.
0 or negative number cancels check.
Pure number, [0
… 8000]
4
PN[2]
0: Do not compensate cogging
Non-zero: Compensate cogging
NA 0
PN[3]
0: Do not make speed compensations
to current loop
Non-zero: Make speed
compensations to current loop
NA 0
PN[4]
Position reference counts per
electrical revolution.
In stepper motor terminology,
PN[4]/4 is the “micro-stepping
factor” – there are PN[4]/4 position
counts in one step.
Pure number,
[1…8192]
1024
PN[5]
Apply varying notch filter on
reference for open loop stepper
0: Do not apply
Otherwise: Apply
Pure number
[0,1]
0
PN[6]
Re-find commutation angle each
motor on
0: Do not apply
Otherwise: Apply
Pure number
[0,1]
0
PN[7]..PN[8] Reserved
PN[9]
1: Closed loop stepper mode
(applicable only for UM=3)
Pure number
[0,1]
0
SimplIQ for Steppers Command Reference Manual
Alphabetical Listing
MAN-STECR (Ver. 1.1)
130