Pf[n] – floating point parameters – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 132
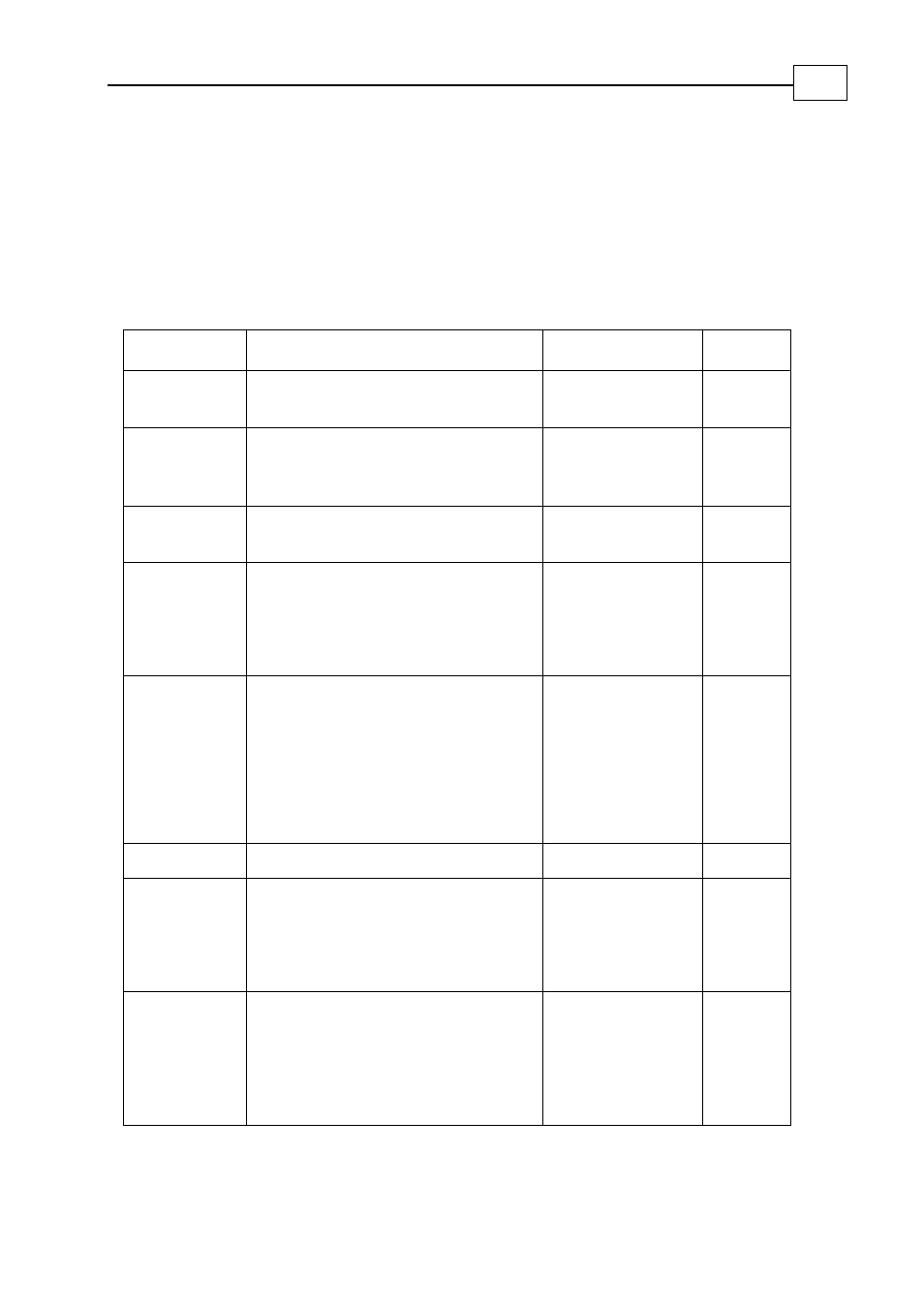
PF[N] – Floating point parameters
Purpose:
This parameter vector is used for device data, which is normally entered by the tuning
environment. The user is encouraged to use the tuning environment instead of
entering these parameters manually.
Parameter Description
Units
[range] Default
PF[1]
Motor induction. Used for correcting
the motor voltage at high speeds.
mH. [0.05 … 500]
1.0
PF[2]
Motor torque constant, Ke. Used for
correcting the motor voltage at high
speeds.
Volt/(Rad/Sec), [0
...50]
0.1
PF[3]
Current loop delay, used for cogging
compensation
Sec, [0 ... 2e-3]
1e-4
PF[4]
Maximum electrical frequency for
applying full cogging correction.
Beyond this frequency, cogging
correction decreases.
Hz, [80 ... 5000]
200
PF[5]
Maximum electrical frequency for
applying cogging correction at all.
Beyond this frequency, cogging
correction is not made.
For proper operation, keep
PF[5]>PF[4].
Hz, [80 ... 5000]
450
PF[6] Reserved
40
PF[7]
Ratio between current command step
size and resulting current overshoot.
Serves in overshoot limiting of the
current loop.
Pure number,
[0…1]
0.20
PF[8]
Ratio between current command
slope in (Unit/Ts) and resulting
current overshoot.
Serves in overshoot limiting of the
current loop.
Pure number
[0…3]
0.15
SimplIQ for Steppers Command Reference Manual
Alphabetical Listing
MAN-STECR (Ver. 1.1)
124