ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 214
When the switch action terminates (a Stop switch is released, for example), the SD
acceleration applies until the actual speed command converges to the speed demand.
The following rules are always kept:
The total speed command is limited to the range [VL[2]…VH[2]].
When an event (RLS, FLS, etc.) forces the zero speed command, this event does
not affect the reference generator, which continues to behave normally. When the
switch action is complete, the speed command converges to the output of the
reference generator.
The acceleration limiter limits the decelerations and accelerations due to abrupt
changes of the auxiliary reference. The SD applies to the sum of the software and
the auxiliary speed references. The AC and DC parameters are only relevant to
software commands.
When AC and DC are greater than SD, they become irrelevant, because SD
further limits acceleration.
The IL[N] command can program a variety of stop options to an input pin. A
pulse at a programmed I/O pin can be setup to stop the software reference
generator, or to zero the entire speed command.
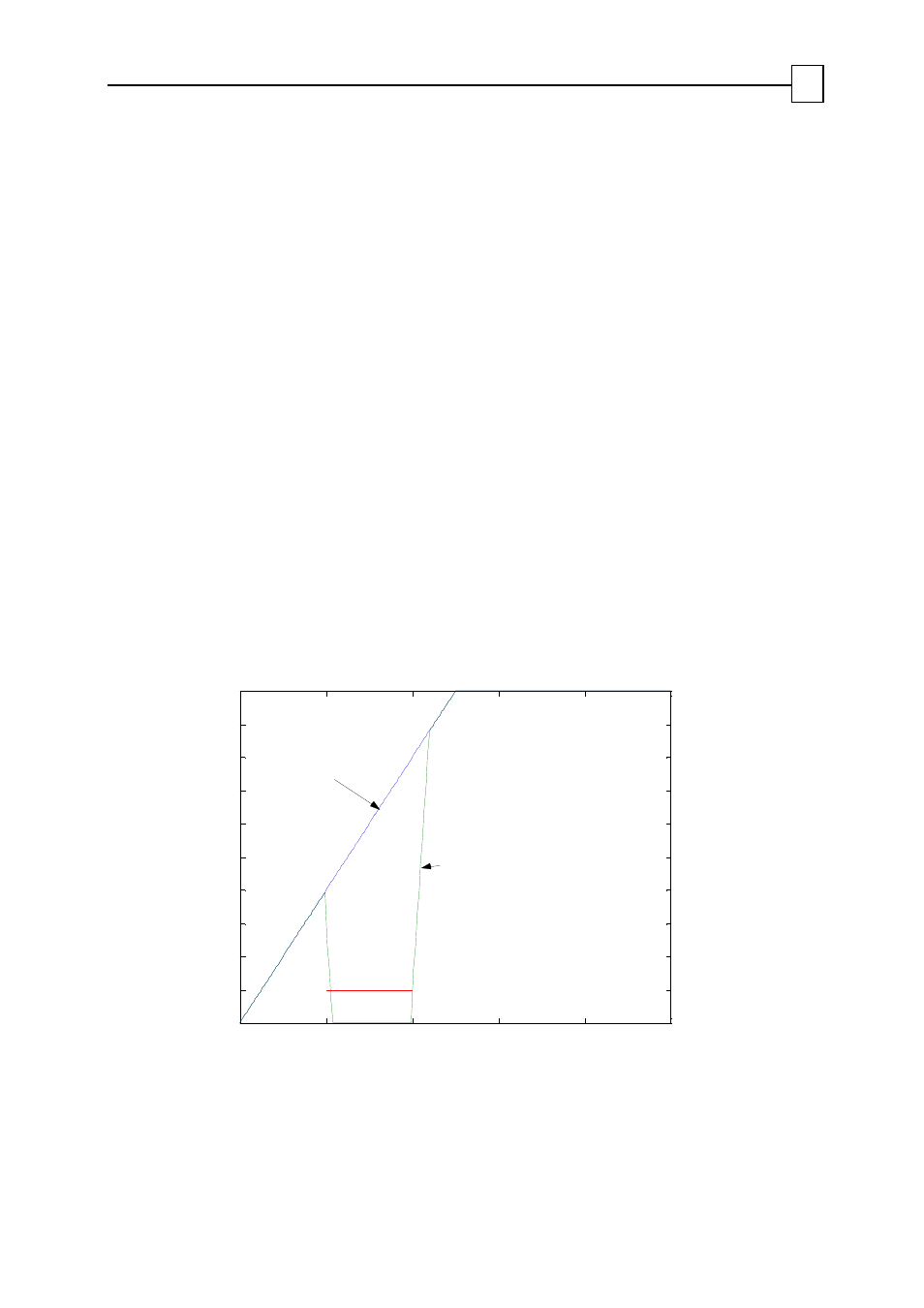
Example:
SD=100,000, MO=1, AC=10,000, DC=10,000, JV=5000, BG;
At the time of 0.2 seconds, a switch programmed as a hard stop is activated, and released
at the time of 0.4 seconds. The following waveforms result:
0
0.2
0.4
0.6
0.8
1
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Com m and generator
output
Com m and to the s peed
c ontroller
S top s witc h
ac tive
Figure 3-5: Results of a Sample Stop Switch Activation
When the stop switch is applied, the speed command decreases to a complete stop,
decelerating at 100,000 counts/second
2
. When the switch is released, the acceleration of
100,000 counts/second
2
is used to converge to the reference generator command.
SimplIQ for Steppers Application Note
Unit Modes
MAN-STECR (Ver. 1.1)
15