1 the pvt table – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 250
0
1
2
3
4
5
6
1000
1020
1040
1060
1080
1100
1120
1140
1160
1180
1200
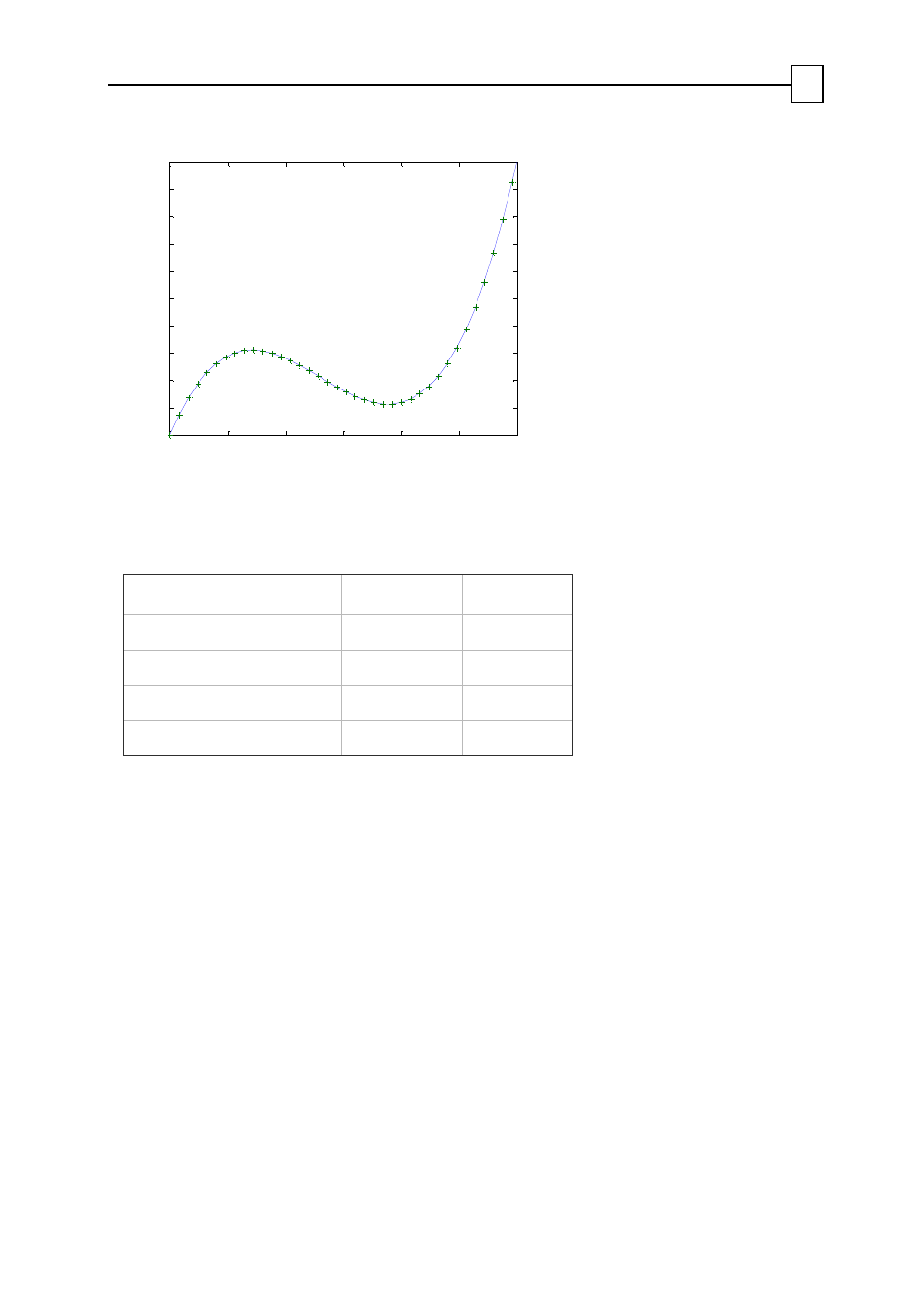
Position
Time
6.1.6.1 The PVT Table
A three-column table is used to define PVT motion. Each row of the table defines the
position and speed at a single time instance.
#Index
P (32 Bits)
V (24 Bits)
T (8 Bits)
1 QP[1]
QV[1]
QT[1]
2 QP[2]
QV[2]
QT[2]
… QP…
QV…
QT…
64 QP[64]
QV[64]
QT[64]
Table 6-7: PVT Table
The table has 64 rows, enabling the specification of up to 63 consecutive PVT motion
segments (64 segments if the table is used cyclically). The cells of the table may be
accessed using the QP, QV and QT commands:
The QP[N] command sets/reads the nth row of the P column.
The QV[N] command sets/reads the nth row of the V column.
The QT[N] command sets/reads the nth row of the T column.
The first PVT point must be within the range XM[1]…XM[2]. the remaining PVT points
need not be within modulo range; but the difference between consecutive PVT position
points must be less than(XM[2] - XM[1])/2. For example, suppose that XM[1] = 0 and
XM[2] = 1000. If the PVT describes a trajectory beginning at 0 and ending at 10,000, the
motor will travel 10,000 counts, fully completing its position range 10 times.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
51