Figure 6-9: pt auto-increment mode flowchart – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 263
The PDO does not specify the QP vector elements to be programmed; instead, a write
pointer specifies them. The parameter MP[6] sets the value of the write pointer, which
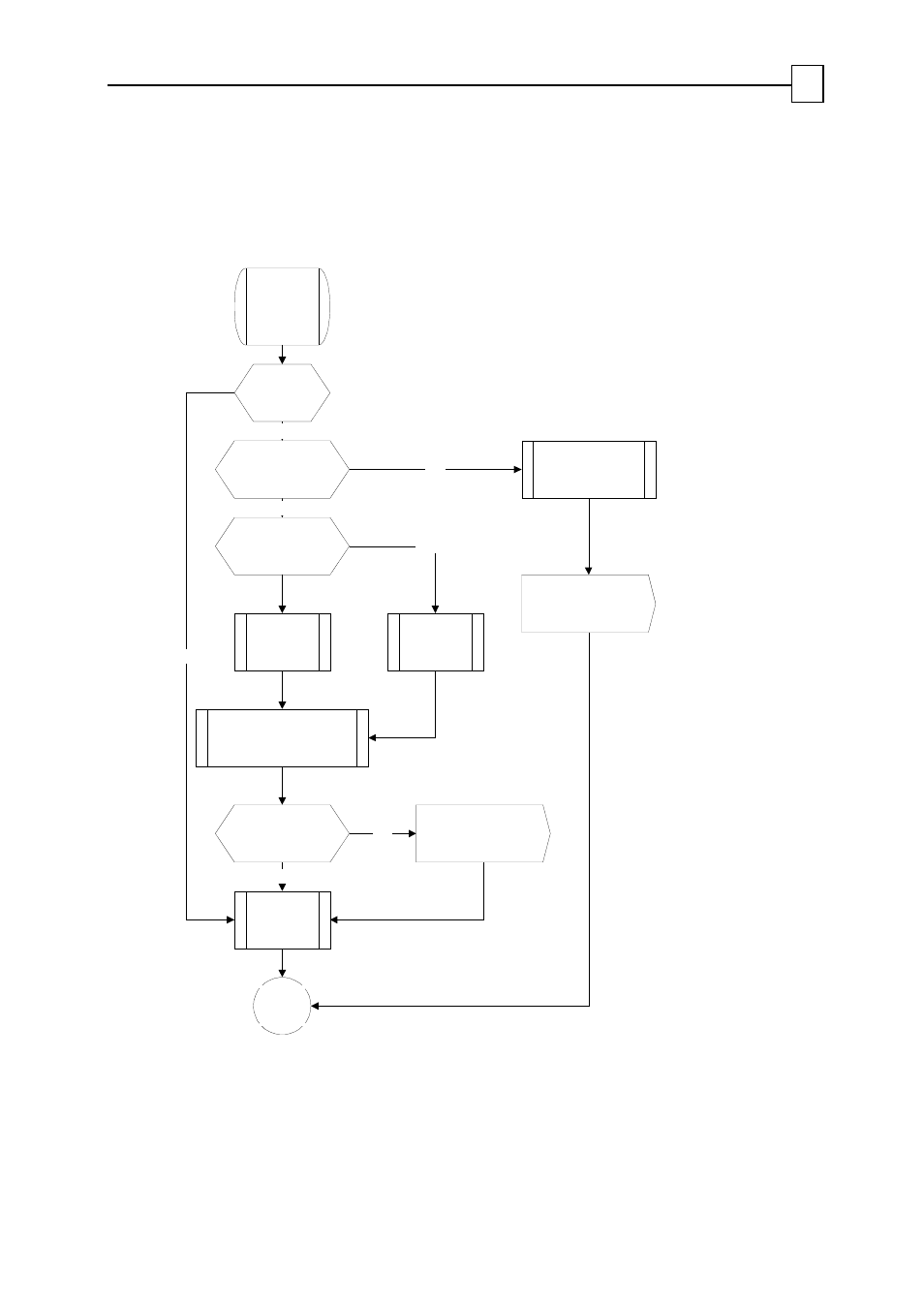
may be set once for the entire motion. The write pointer is incremented automatically by
2 each time the drive receives a new PT motion-programming message. The CANopen
auto-increment mode is described in the following flowchart:
Motion
segment
completed
?
N >= MP[2]-1
Increment
read pointer
Read the read pointer to the
QP vector and calculate the
parameters of the next motion
segment
Initial
conditions:
PT read
pointer equals
N
Interpolate
position
command
Go to
position
controller
Exit PT mode:
Set Stop motion,
using the SD
deceleration
Set the read
pointer to
MP[1]
Yes
No
No
EMERGENCY:
QUEUE
UNDERFLOW
MP[4]>0 and
(Write pointer ==
N+1 or
left time < MP[4])
EMERGENCY:
QUEUE LOW
Yes
No
Read pointer ==
Write pointer
Yes
Yes
Figure 6-9: PT Auto-increment Mode Flowchart
This flow differs from the basic mode because:
The read pointer reaching the write pointer identifies motion queue underflow.
Emergency objects are issued for the queue low and queue underflow events.
d. Programming Sequence for Auto-increment PVT Mode
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
64