5 jog, Simpliq for steppers – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 244
6.1.5 Jog
In a jogging motion, the motor receives a command to move at a fixed speed. The AC and
DC parameters indicate the acceleration or deceleration to the desire speed.
Jog motions may be initiated any time by using the JV command, and not necessarily
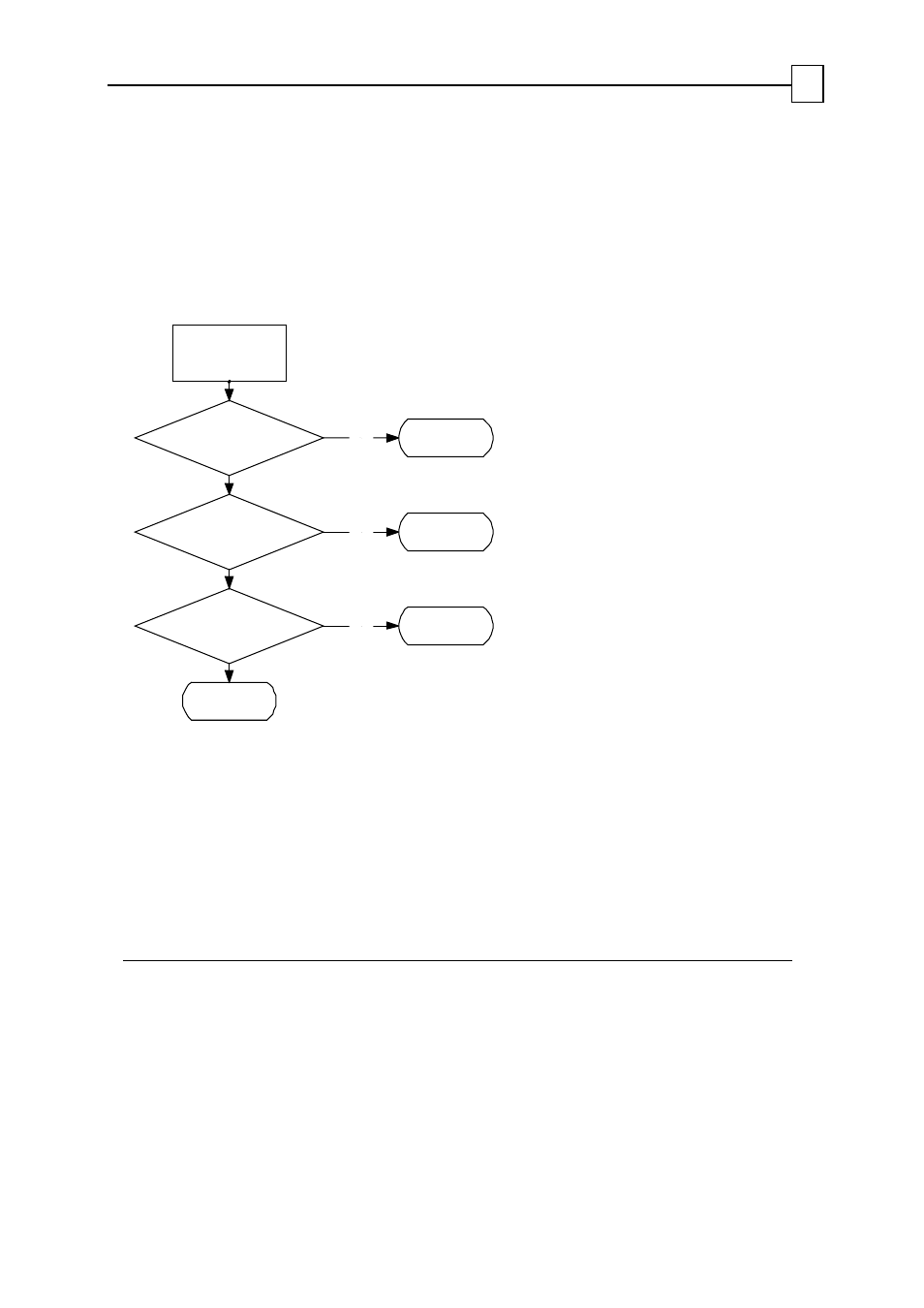
from a stationary state. The jog mode decisions, made every position control cycle, are
given in the following flowchart.
Start
JV > 0 and
Speed > JV?
Yes
Apply DC
Speed = JV?
Yes
Apply AC
Maintain JV
JV< 0 and
Speed < JV?
Yes
Apply DC
Figure 6-5: Jog Decisions Flowchart
All parameters in the flowchart — including AC, DC, JV and the position target — are
updated by a BG command or by its hardware equivalent (refer to the IL[N] command in
the
SimplIQ for Steppers
Command Reference Manual).
Jog motions can continue indefinitely. The position reference jumps by XM[2] - XM[1]
when it reaches the modulo boundary, but the speed remains constant. The jog motion
parameters are summarized in the following table:
Parameter Action
AC
Acceleration, in counts/second
2
DC
Deceleration, in counts/second
2
SF
Smooth factor, in milliseconds
JV Jog
velocity
Table 6-6: Jog Motion Parameters
The JV command specifies that the next motion will be a jog, and also what speed the jog
will target.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
45