ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 249
-3
-2
-1
0
1
2
3
x 10
4
-2
-1
0
1
2
x 10
4
0
5
10
15
20
25
-2
-1
0
1
2
x 10
5
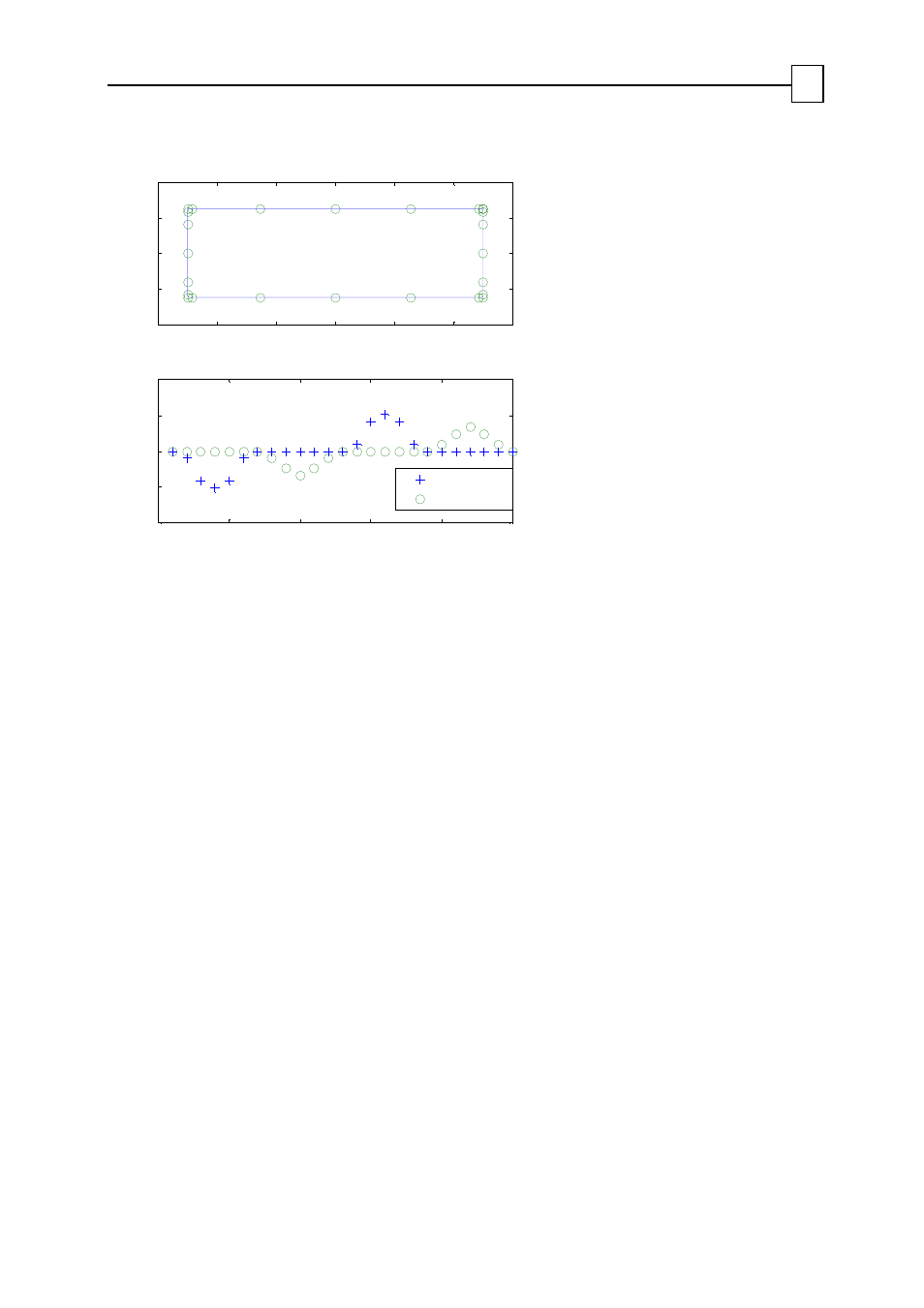
x speed
y speed
C ounts/sec
P VT points
Rectangle
C ounts
C ounts
For the corner points both the x and y speeds are specified to zero. The interpolation
error for the entire rectangle is zero.
Example 4:
A PVT interpolation interval contains these values:
Starting position = 1000 counts
Starting speed = 100,000 counts/second
End position = 1200 counts
End speed = 190,000 counts/second
Time = 6 milliseconds
The interpolated path for the data of the table, for a controller with a sampling time of
160 milliseconds, is depicted in the following figure. The + symbols indicate the points at
integer multiples of the controller sampling time. At these points, the drive evaluates the
interpolated motion path.
The end point does not necessarily fall on a controller sampling time. Strange-looking
position commands may result if the speed choice is not consistent with the position and
time definitions. The position distance and the time between points imply an average
speed of (1200 - 1000)/0.006 = 33,000 counts/second. This average conflicts with the
boundary point speed specifications of 100,000 counts/second and 190,000 counts/sec,
respectively.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
50