Point-to-point (ptp), 1 basic – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 240
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
0
200
400
600
800
1000
1200
Time, sec
M
o
to
r
p
o
s
it
io
n
TR[2]
1000-TR[1]
1000+TR[1]
Target=1000
Entering the target
radius
MS=0
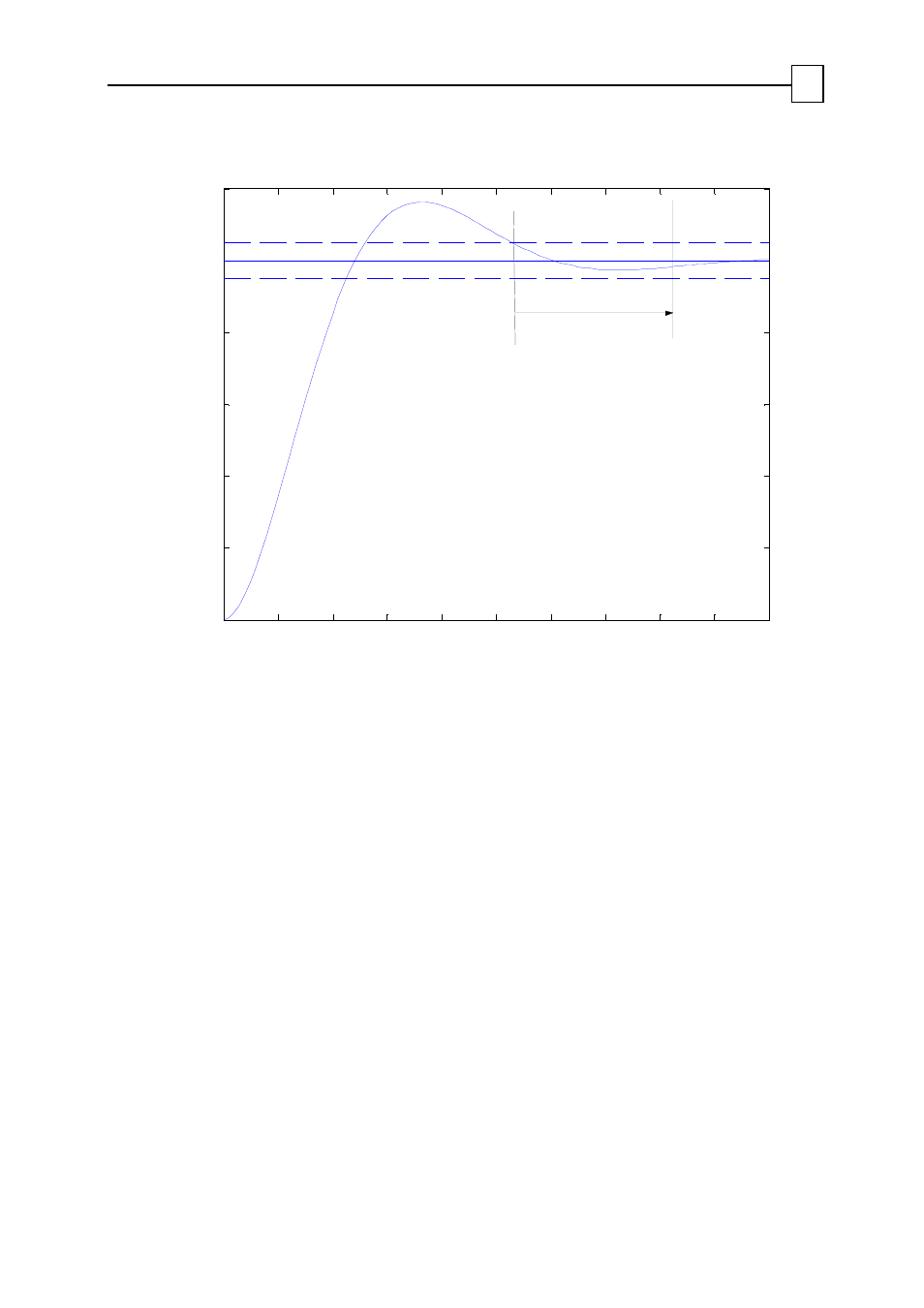
Figure 6-1: Target Time and Target Radius
In this figure, the motor position settles after overshooting the target of 1000 counts.
The target radius is TR[1]=50.
The drive sets MS=0 (converged to final position) after the motor position is within the
target radius for long enough time.
Note that while overshooting, the motor position was briefly within the target radius; the
motion status (MS) ignore this brief crossing as it did not sustain for TR[2] milliseconds.
6.1.4 Point-to-Point
(PTP)
6.1.4.1 Basic PTP
In this motion mode, the motor moves from its present position to a final point at zero
speed, and stays there. The trajectory to the final point is calculated based on speed,
acceleration and deceleration limits, as set by the AC, DC and SP parameters
respectively.
The largest PTP motion available is (XM[2] - XM[1])/2, because with modulo calculation
the PTP motion always goes the short way around. For example, if XM[1]=-500 and
XM[2]=500, the present position reference is 490 and the command PA= -490. When BG is
entered, the position reference increases and goes through 499 to -500, and then to -490.
The total length of the movement will be 20 counts.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
41