ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 243
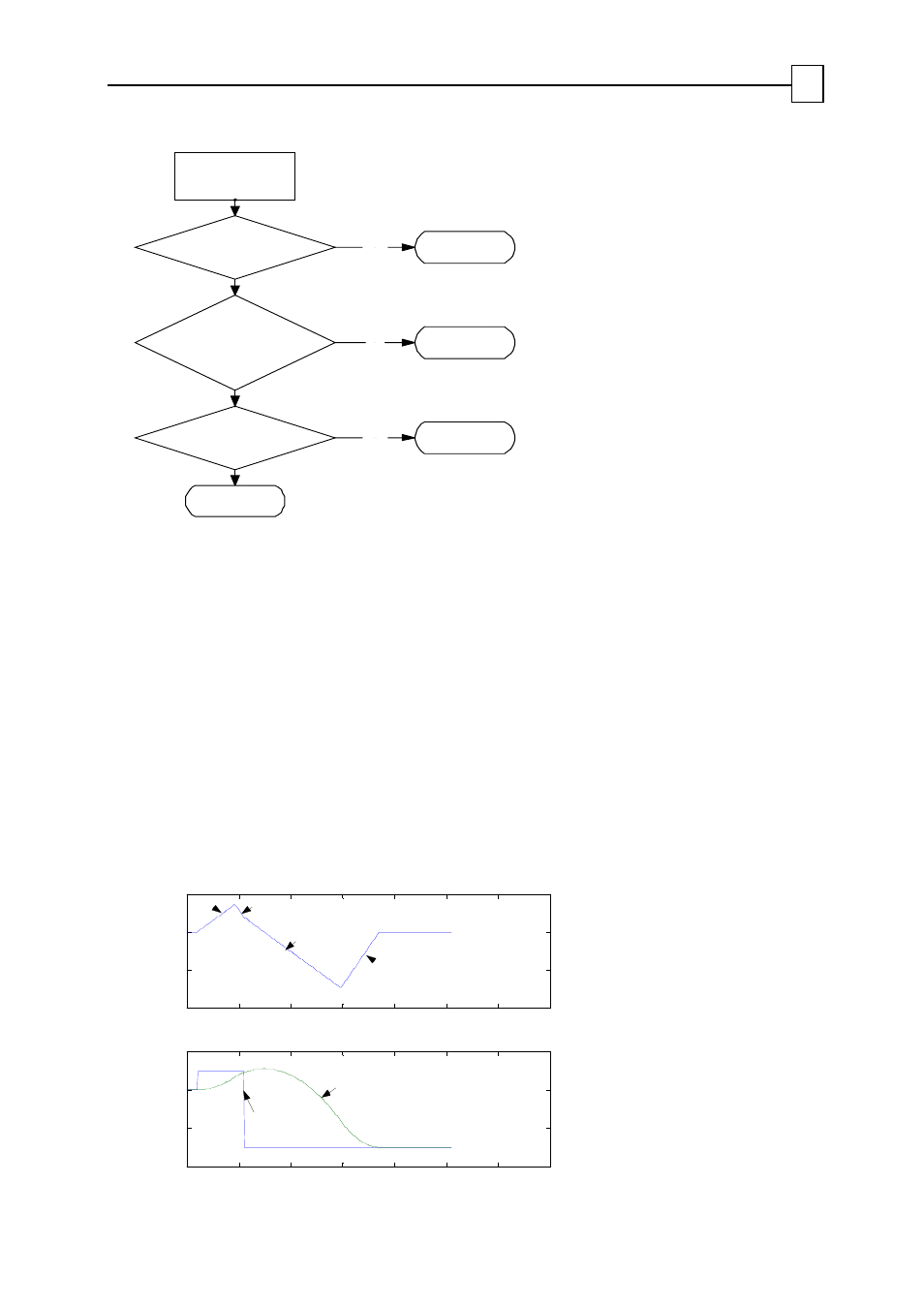
S t a r t
W ill s t e a d y
d e c e le r a t io n a t
D C s to p m o tio n
b e f o r e ta rg e t ?
S p e e d > S P ?
S p e e d = S P ?
Y e s
N o
Y e s
A p p ly A C
M a in t a in S P
A p p ly D C
A p p ly D C
Figure 6-4: PTP Decisions Flowchart
Example of changing the position target on-the-fly:
The acceleration and final speed are:
AC=100,000, DC=200,000, SP=20,000,
starting from
PX=0
and target position
PA=100; BG;
The position reference has not yet stabilized at the position target, when the position
target is changed by the command
PR=-400; BG;
to the position target of
(PA+PR)=-300
.
The drive calculates the position reference to reach the new target.
Note that in this example, the position reference overshoots the original position target of
100. This is because at the time that the position target was changed, the drive was
approaching the target using DC. When a new target is set, the drive exits the state of
final approach. Therefore, it uses the AC acceleration, which is smaller than DC in this
example. With the reduced acceleration, it cannot avoid the overshoot.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-10000
-5000
0
5000
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
-400
-200
0
200
C ounts/sec
C ounts
Time (S ec)
Time(sec)
P osition reference
Target position
A C
D C
D C
A C
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
44