ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 271
E
x
te
rn
a
l p
o
s
iti
o
n
c
o
m
m
a
n
d
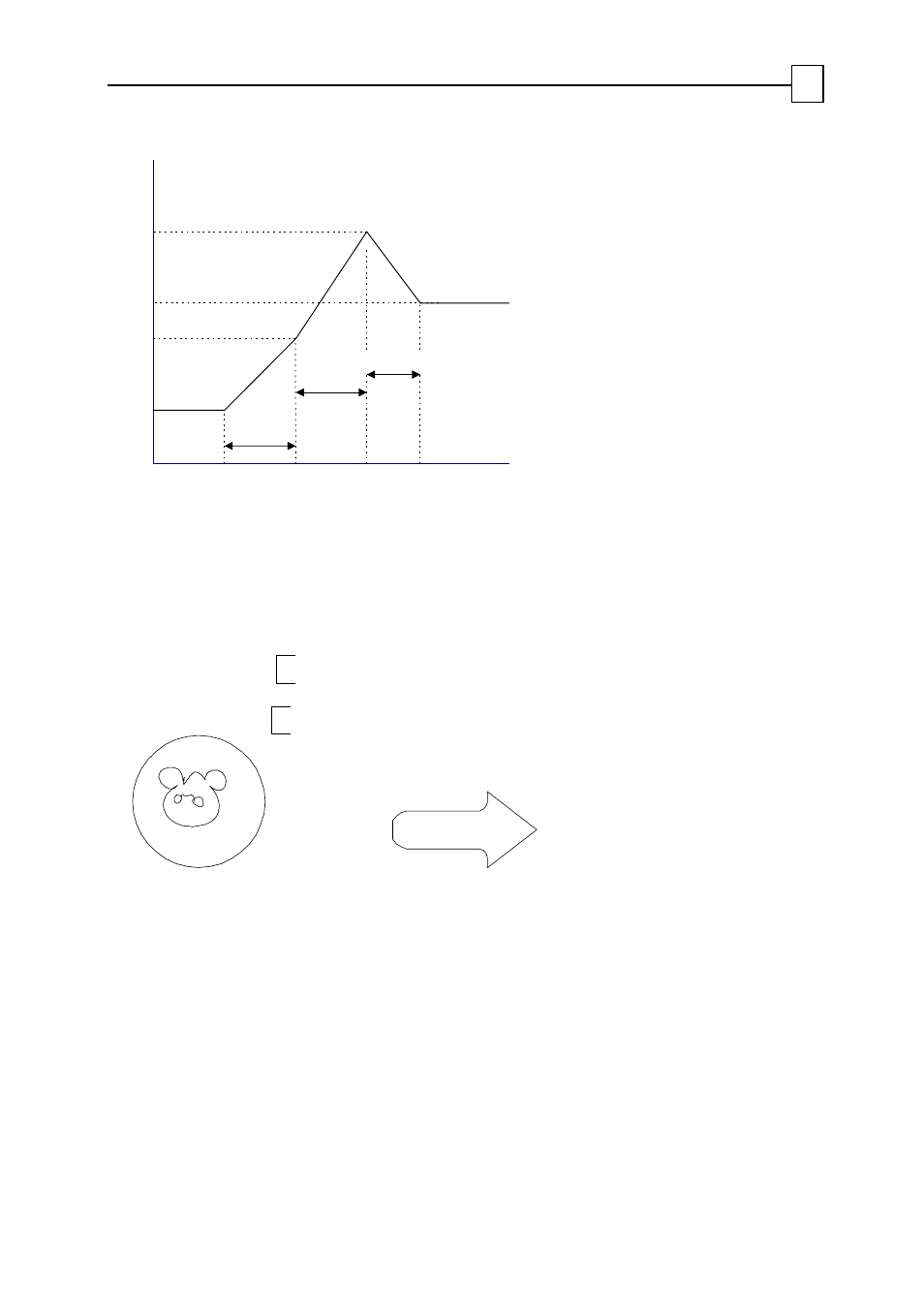
ECAM table input
0
EM[4]
ET[3]
EM[4]-EM[7]
ET[1]
ET[2]
ET[4]
EM[4]
IETm ax
Figure 6-12: Linear ECAM
Example 2:
Consider an application in which a two-axis x-y servo system is used to plot chocolate
bears on birthday cakes:
Head contour
Eyes
Cake
moves
The cakes come from the oven on a conveyor. An incremental encoder measures the
position of the conveyor. Each time a new cake arrives, it activates the DIN#1 input of the
drive. In response to DIN#1, the x-y axes begin to contour the head of the bear, drawing
it with chocolate. The chocolate flow is stopped while the x-y axis travels towards the
start of the bear eyes. After the eyes are drawn, the x-y stage returns to its initial position,
ready for another cake.
Both drives that manage the x and y axes operate in ECAM mode. They get their position
reference as a function of the location of the conveyor, via the auxiliary encoder input.
The ECAM motion starts when a cake arrives at the plotting station and continues until
the conveyor travels 4000 counts.
One of the drives uses a digital output to control the flow of the chocolate out of the
drawing nozzle.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
72