Stop manager internal elements, 2 stop manager internal elements – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 278
Limits the magnitude of the controller command to the maximum allowed range.
This is necessary because even if the software command is generated within the
permitted limits and the external command is also within the permitted limits,
their total value may exceed the permitted limits.
The stop manager prevents the position reference generator from driving the motor to
undesired positions. It does not affect the reference generator.
The commands relevant to the stop manager are:
Command Description
SD
Maximum rate that the motor can accelerate/decelerate
IL[N]
Input logic: define the functions associated with the digital inputs
VH[N],
VL[N]
Maximum allowed controller command
XM[N],
YM[N]
Modulo count for main and auxiliary sensors
Table 6-17: Stop Manager Commands
6.3.2
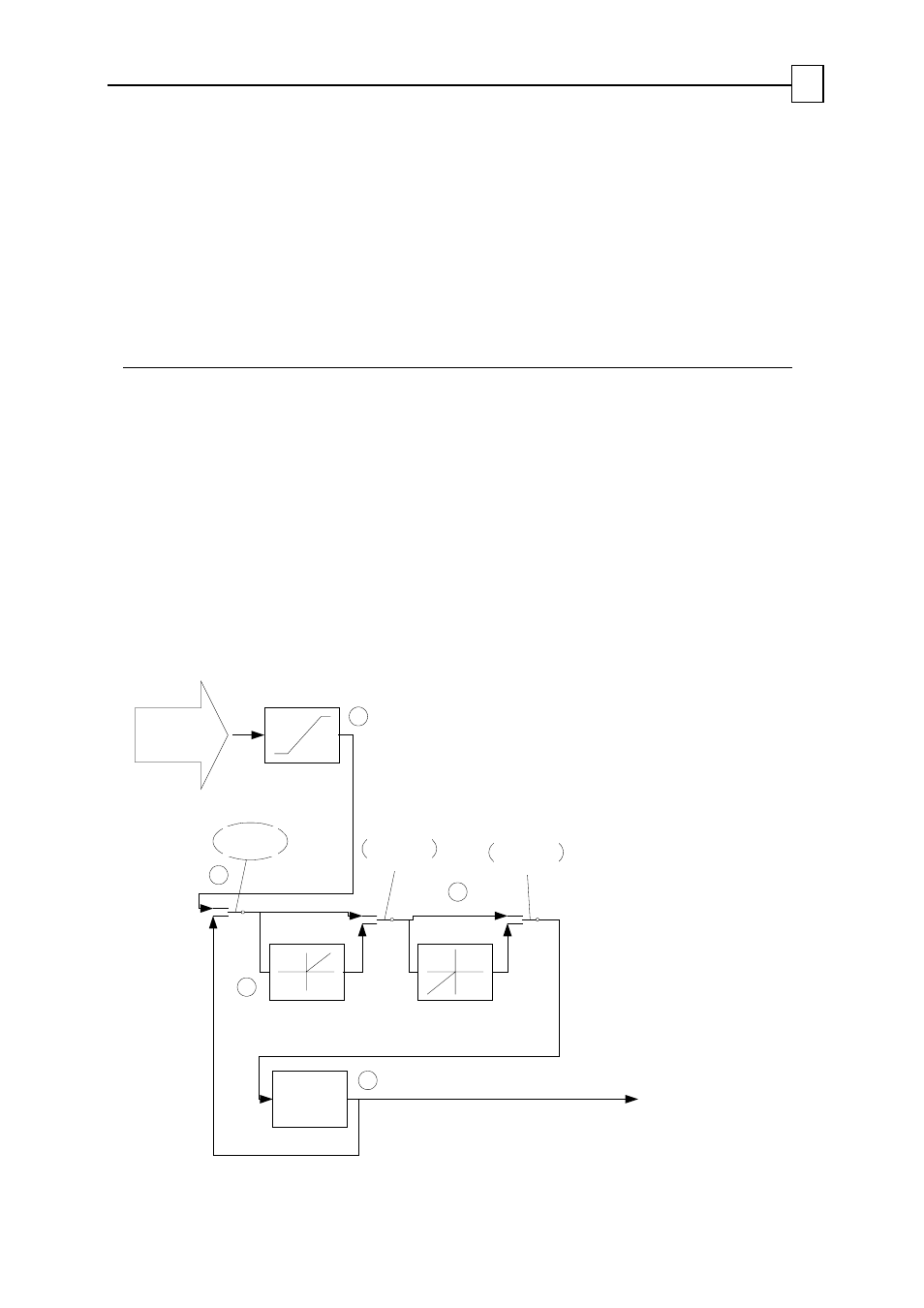
Stop Manager Internal Elements
The stop manager is depicted in the following diagram:
Position
com m and
(Software and
External)
Clip Position com m and
to range
Select zero
if hard-stop
P revent backwards m otion
Select
direction lim it
if RLS
Select
direction lim it
if RLS
Prevent Forward Motion
Rate &
Acceleration
lim iter
Position com m and to
m otion controller
1
2
3
4
5
Figure 6-14: Stop Manager Block Diagram
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
79