Dividing the ecam table into logical portions, 3 dividing the ecam table into logical portions – ElmoMC SimplIQ Digital Servo Drives-Bell Command Reference User Manual
Page 273
E
x
te
rnal
pos
it
ion
com
m
a
n
d
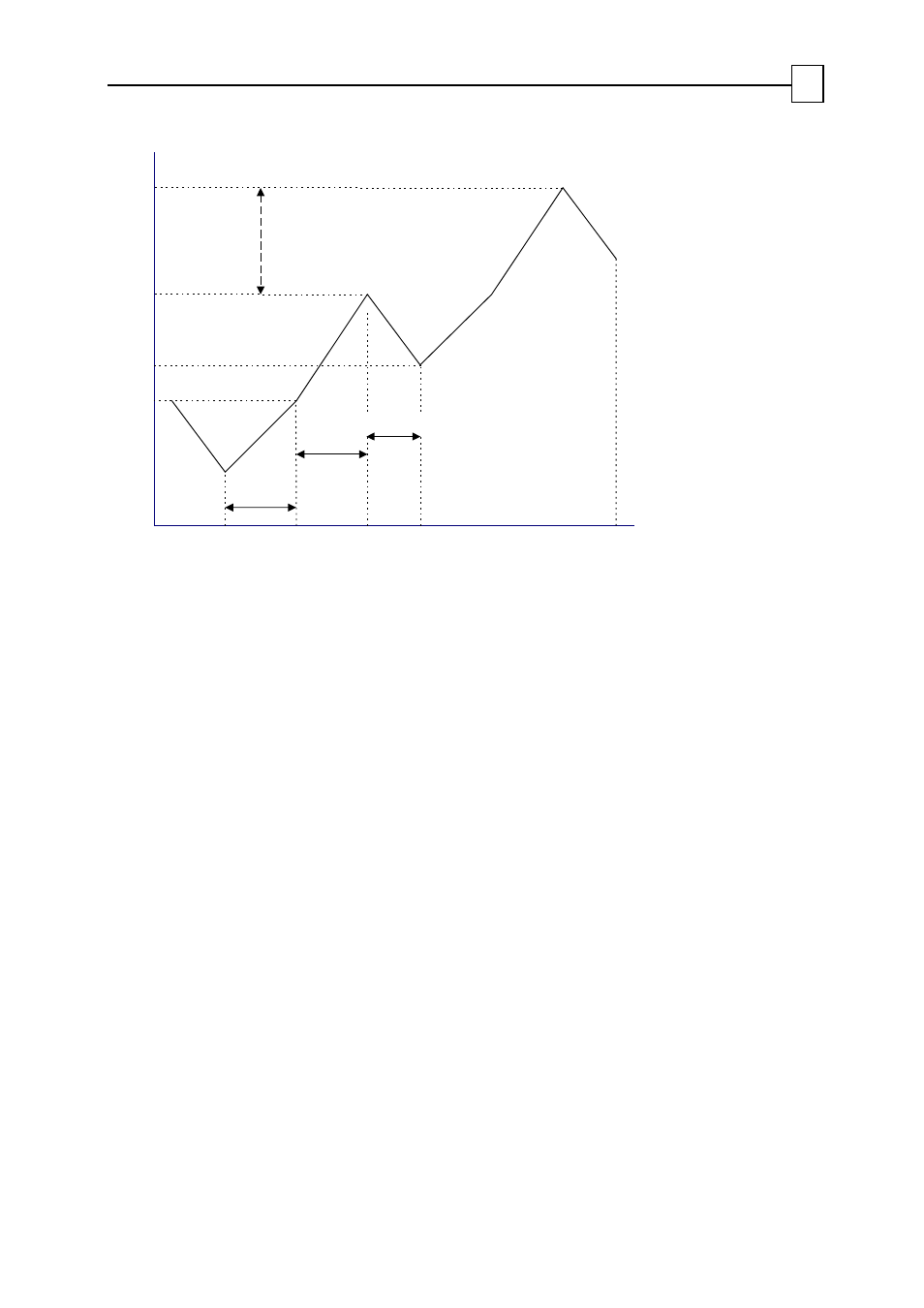
ECAM table input
0
EM [4]
ET[3]
EM [4]-EM [7]
ET[1]
ET[2]
ET[4]
EM [4]
IETm ax
2 IE Tm ax
ET[EM [2]]-ET[EM [5]]
Figure 6-13: Cyclical ECAM
Note that the external position command is summed from the ECAM table outcome and
a cumulative offset, which is n x (ET[EM[2]] = ET[EM[5]]) with n being an integer.
The cumulative offset is lost in the following circumstances:
Homing changes the auxiliary position counter value.
FR[3] is changed.
EM[1] is changed.
EM[1] is set to the existing value, with EM[2], EM[3], EM[4] or EM[5] changed.
When the cumulative offset is lost, and if the software reference generator is not running
an interpolated mode, the software reference is automatically adjusted by the same value
so that the motor will not jump (refer to
section
6.2.3
Dividing the ECAM Table into Logical
Portions
The ECAM table can store several distinct movements, with a portion of the table used
for each movement. This enables a future movement to be programmed into the drive
while the present movement is being executed.
SimplIQ for Steppers Application Note
The Position Reference Generator
MAN-STECR (Ver. 1.1)
74