2 operation with method to use position data in rc – IAI America XSEL-S User Manual
Page 97
5. Program Creating
91
5.2
Operation with Method to Use Position Data in RC
For Fieldbus Type, edit the position data of the RC controllers on each RC controller using the RC PC
software. Therefore, it is unnecessary to have the process in 2) of procedures (1) to (3), and start from 3) in
Procedure (3).
An example of operation in which one RC controller is used to move an actuator back and forth between
position data Nos. 0 and 1 is explained.
Install the X-SEL PC software and RC PC software beforehand. (If the SEL-T or SEL-TD is used, refer to
the operation manual for the SEL-T or SEL-TD.)
Enter position data first, and then create a program.
Caution: When supplying the power, turn ON the slave controller (RC Controller, ROBONET, MSEP
or MSCON) prior to or at the same time as X-SEL.
If the X-SEL is started first, it will recognize an slave controller power error and generate an
RC gateway major failure error.
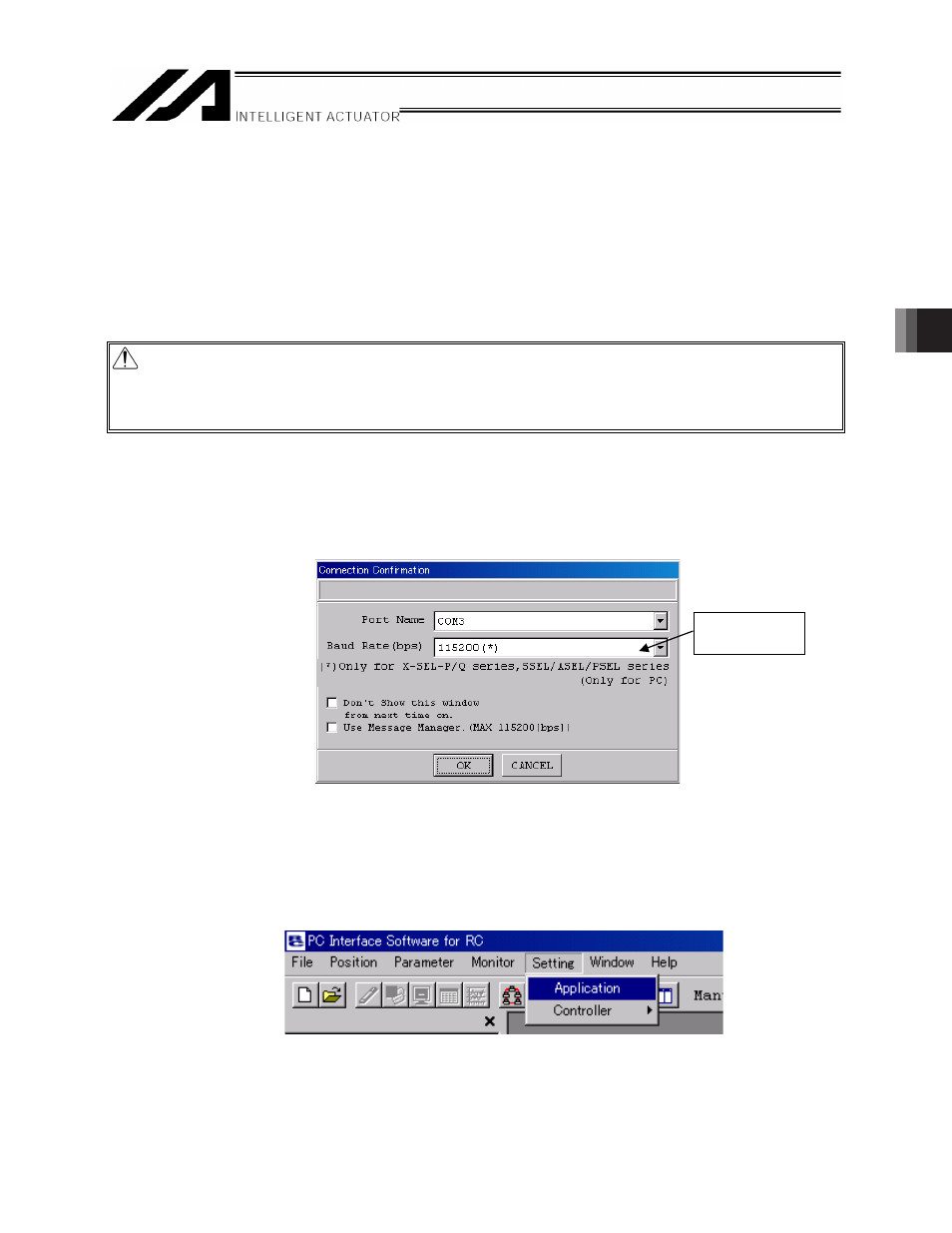
(1) Starting the X-SEL PC software (checking the baud rate) (Not necessary for Fieldbus Type)
Click
Start, point to Programs, point to IAI, point to X_SEL, and then select X-SEL PC Software.
When the connection confirmation screen appears, write down the Baud Rate (bps). Next, select
CANCEL, restart the PC software, and then shut it down immediately.
(2) Setting the baud rate in the RC PC software (Not necessary for Fieldbus Type)
Set the baud rate for each connected RC controller or ROBONET.
1) Click
Start, point to Programs, point to IAI, point to RoboCylinder, and then select RC PC
Software.
2) When the RC PC software is started, click
Setting, and then select Application.
Write down
the baud rate.