IAI America XSEL-S User Manual
Page 129
5. Program Creating
123
5.5
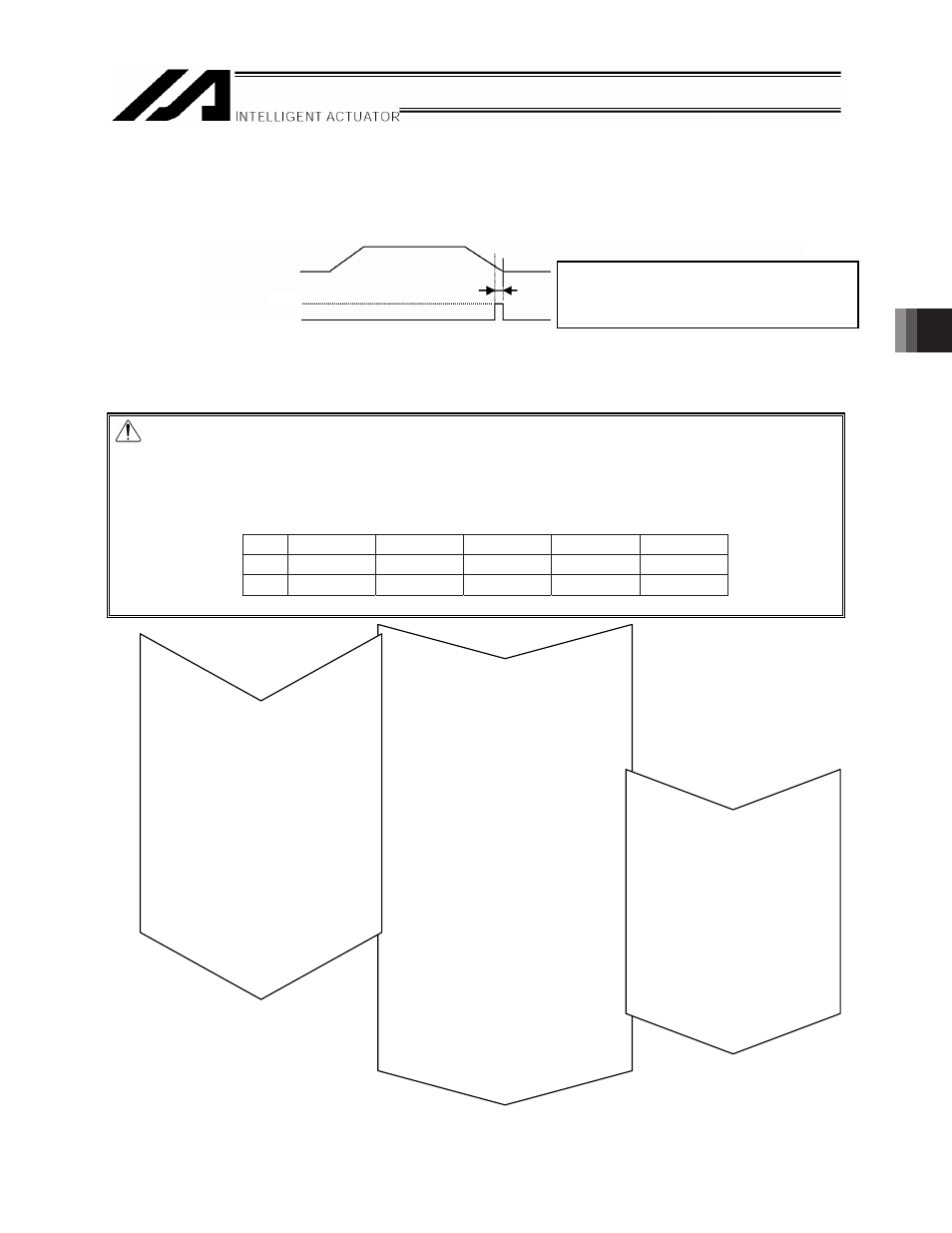
Checking the Completed Position (Positioning Band)
In the “Method to use position data in X-SEL”, whether or not the positioning command (RMVP, RMPI,
RMVD or RMDI) has completed is checked only based on the output signal PEND (positioning complete
signal) issued by the RC controller.
Accordingly, follow the example below if you want to check whether the current position is within the
positioning band after the positioning command has completed.
Caution: In the “Method to use position data in RC”, the output signal PEND is output while the
current actuator position is inside the positioning band set in the position table.
Accordingly, there is no need to check the completed position.
(Example) Program that performs completed position check
RC axis 4 moves back and forth between position No.0 and position No.1.
x
Position data of RC axis 4
Actuator movement
Positioning band
Target position
The PEND turns ON while the current
actuator position is within the positioning
band from the target position.
Operation of subroutine 1
[1] Get the target position from the
position data
[2] Get the positioning band from the
position data
[3] Calculate the lower limit of target
position
(Lower limit of target position =
Target position – Positioning band)
[4] Calculate the upper limit of target
position
(Upper limit of target position
= Target position
+ Positioning band)
Operation of main program
[1] Set a variable number for
subroutine preparation
[2] Execute subroutine 1 (get the
target position for position No. 0)
[3] Move the axis to position No. 0
via the RMVP command
[4] Execute subroutine 2 (check the
completed position for position
No. 0)
[5] The program ends due to a
completion check error (600 or
601 turns ON)
[6] Set a variable number for
subroutine preparation
[7] Execute subroutine 1 (get the
target position for position No. 1)
[8] Move the axis to position No. 1
via the RMVP command
[9] Execute subroutine 2 (check the
completed position for position
No. 1)
[10] The program ends due to a
completion check error
(602 or 603 turns ON)
Operation of subroutine 2
[1] Get the current position of
the RC axis
[2] Compare the current position
against the lower limit of
target position (a flag turns
ON if an error is found)
[3] Compare the current position
against the upper limit of
target position (a flag turns
ON if an error is found)
No.
Pos
Vel
Acc
Push
Inp
0
0
75
0.3
0
0.5
1
200.00
75
0.3
0
0.5
ON
PEND OFF