3 program language used by the rc gateway, 1 list of program language commands – IAI America XSEL-S User Manual
Page 103
5. Program Creating
97
5.3
Program Language Used by the RC Gateway
5.3.1 List of Program Language Commands
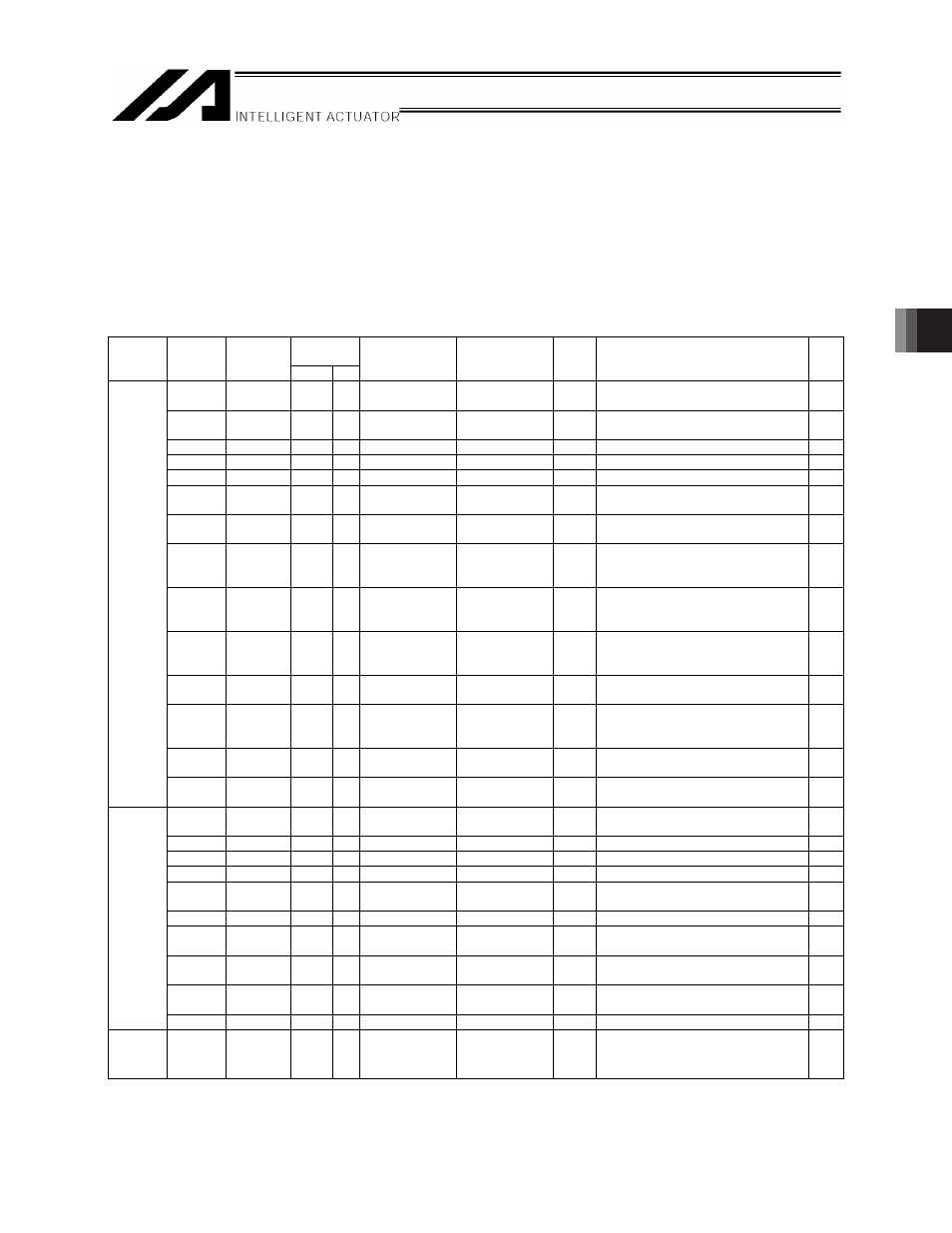
A list of program language (SEL language) commands relating to the RC gateway is shown.
This manual only covers those commands needed by the RC gateway function to operate RC axes. For
more information on X-SEL controller programming and commands, refer to the operation manual for your
X-SEL controller.
In the list, shows whether each command language can be used or not in each method of RC position data
use with ż and ×.
(Available: ż, Unavailable: ×)
RC position
data mode
Category Condition Command
X-SEL RC
Operand 1
Operand 2
Output
Function
Page
Free
RPGT
ż
× RC axis number Position number
CC Assign the RC axis position to
variable 199
100
Free
RPPT
ż
× RC axis number Position number
CP Assign the value of variable 199 as the
position in the RC axis position table
101
Free
RPCR
ż
× RC axis number Variable number
CP Clear RC axis position data
102
Free
RPCP
ż
× RC axis number Variable number
CP Copy RC axis position data
103
Free
RPRD
ż
× Position number Prohibited
CP Read the current RC axis position
104
Free
RPRQ
ż
ż RC axis number Variable number
CP Read the current RC axis position
(direct reading of 1 axis)
105
Free
RPVL
ż
× RC axis number Position number
CP Assign the value of variable 199 as the
speed in the RC axis position table
106
Free
RPAD
ż
× RC axis number Position number
CP
Assign the value of variable 199 as
the acceleration/deceleration in the
RC axis position table
107
Free
RPIP
ż
× RC axis number Position number
CP
Assign the value of variable 199 as
the positioning band in the RC axis
position table
108
Free
RPTQ
ż
× RC axis number Position number
CP
Assign the value of variable 199 as
the current-limiting value in the RC
axis position table
109
Free
RGVL
ż
× RC axis number Position number
CP Assign the speed in the RC axis
position table to variable 199
110
Free
RGAD
ż
× RC axis number Position number
CP
Assign the acceleration/deceleration
in the RC axis position table to
variable 199
110
Free
RGIP
ż
× RC axis number Position number
CP Assign the positioning band in the RC
axis position table to variable 199
111
R
C
a
xi
s p
os
iti
on
o
pe
ra
tio
ns
Free
RGTQ
ż
× RC axis number Position number
CP Assign the current-limiting value in the
RC axis position table to variable 199 111
Free
RAXS
ż
ż Upper byte of
axis pattern
Lower byte of
axis pattern
CP Set the RC axis pattern
112
Free
RSON
ż
ż Prohibited
Prohibited
PE Turn ON the RC axis servo
113
Free
RSOF
ż
ż Prohibited
Prohibited
PE Turn OFF the RC axis servo
113
Free
RHOM
ż
ż Prohibited
Prohibited
PE Perform home return of the RC axis
114
Free
RMVP
ż
ż Position number Prohibited
PE Move the RC axis via position
specification
115
Free
RMPI ż
(Note 1)
× Position number Prohibited
PE Move the RC axis incrementally
116
Free
RMVD
ż
× RC axis number Variable number
PE Move the RC axis via direct value
specification
117
Free
RMDI ż
(Note 1)
× RC axis number Variable number
PE Move the RC axis incrementally via
direct value specification
118
Free
RPUS
ż
× RC axis number Position number
PE Move the RC axis via push-motion
operation
119
R
C
a
ct
ua
to
r c
on
tro
l c
om
m
an
ds
Free
RSTP
ż
ż Prohibited
Prohibited
PE Decelerate the RC axis to a stop
120
A
cq
ui
si
tio
n
of
RC
axis
in
fo
rm
at
io
n
Free
RCST
ż
ż Variable number RC axis number
CP Get the RC axis status
121
Output operation type
CC: Command successful, CP: Command accepted, PE: Operation complete
(Note 1) RMPI and RMDI are invalid for Fieldbus Type. Using them would generate (405) RC Gateway Communication Identification
Error (SEL).