IAI America XSEL-S User Manual
Page 94
5. Program Creating
88
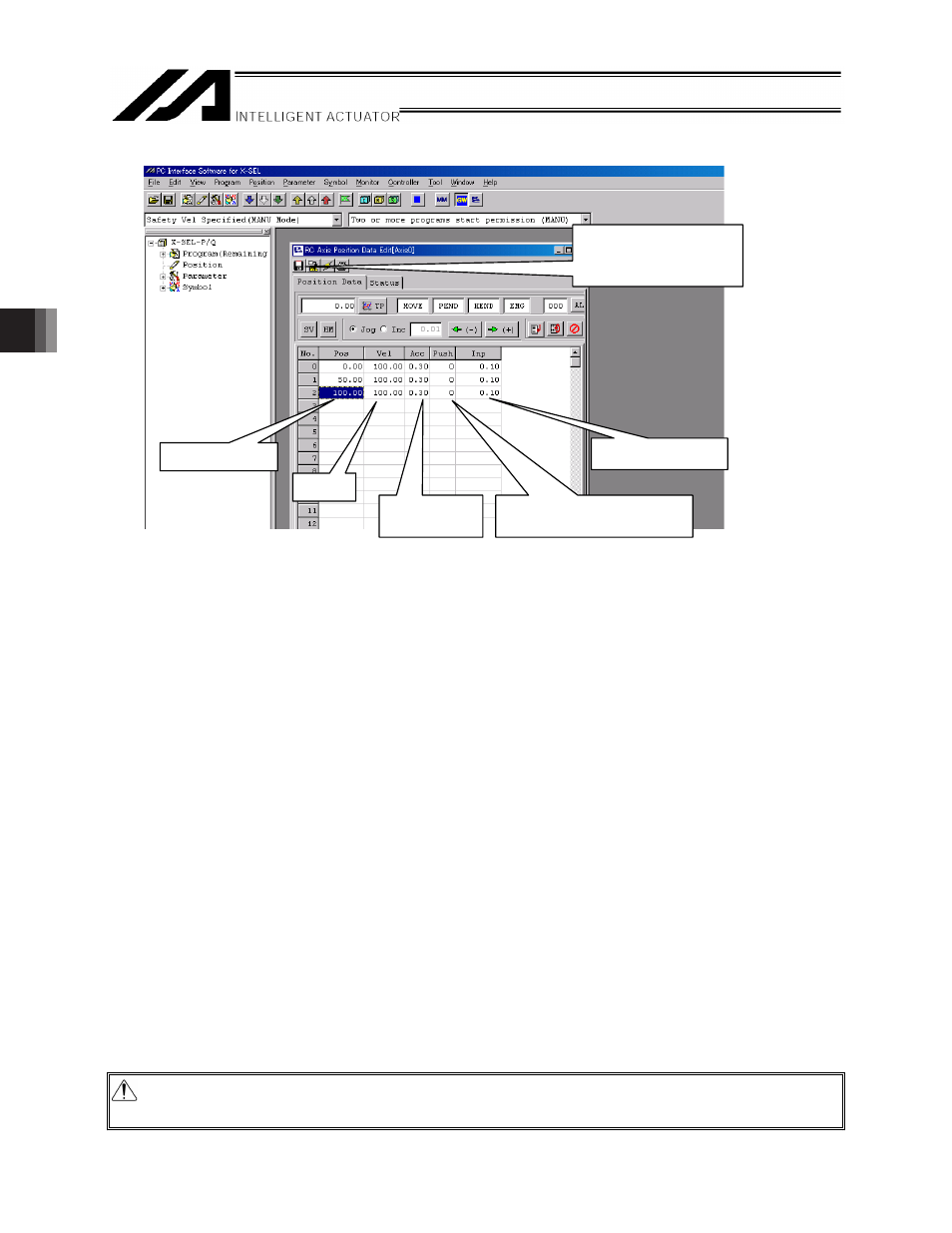
2) Enter the following data, starting from position No. 0.
z
Pos (target position) [mm]
Input the target position that the actuator is to be moved towards.
Absolute coordinate specification: Distance from the actuator home
Incremental coordinate specification: Incremental distance from the current position (travel)
Whether the target position is specified in absolute coordinates or incremental coordinates
(Note1)
is determined by the applicable SEL language command.
(Example: RMVP command o Absolute coordinate specification / RMPI command o
Incremental coordinate specification)
z
Vel (speed) [mm/s]
Enter the speed at which to move the actuator.
z
Acc (acceleration/deceleration) [G]
Enter the acceleration/deceleration at which to move the actuator.
Separate values cannot be set for acceleration and deceleration.
z
Push (current-limiting value during push-motion operation) [%]
Enter the current-limiting value during push-motion operation (RPUS command). Enter “0” if
push-motion operation is not used.
z
Inp (positioning band) [mm]
Enter how long before the target position will the controller recognize completion of positioning.
In the case of push-motion operation (RPUS command), enter the maximum push distance
from the target position.
When you are finished with No.0, enter the same set of data for No.1 in the same manner. If
there are multiple positioning points, enter data one by one in a desired positioning sequence,
starting from No.0.
Note 1 The relative coordinate commands (RMPI and RMDI) cannot be used in Fieldbus Type.
After all data has been entered, click the data write button to write the data.
Caution: x Set position data value within each actuator spec.
x
Position data starts from No.0, which is different on the X-SEL.
After all data has been
entered, click the write
button to write the data.
Positioning band
Current-limiting value during
push-motion operation
Acceleration/
deceleration
Speed
Target position