Using the profile mode, Selecting the profile mode – KEYENCE LT-9001 Series User Manual
Page 34
2-16
Using the Profile Mode
This section describes how to measure the level
differences on the measurement target in the
profile mode.
The operational flow is as follows.
Set the suitable mode for the measurement content.
↓
Adjust the position and height of the sensor head
according to the measurement target.
↓
Set the range to be measured in the profile as the
scanning width [WIDTH/INTERVAL] and the pitch
between measurement points. Set the pitch in
balance with the shape of the measurement target.
↓
Set the upper and lower limits display according to
the shape of the measurement target in the profile
waveform graph.
↓
Change the two areas (Area1 and Area2) to any
range, respectively, on the graph display.
↓
The operational procedure is explained for the
respective items.
Measuring the Level Differences
Setting the Area
Setting the Upper and Lower
Limits Display
Setting the Scan Width/interval
Adjusting the Distance Between the
Measuring Unit and the Measurement Target
Selecting the Profile Mode
1
Turn on the power of the controller.
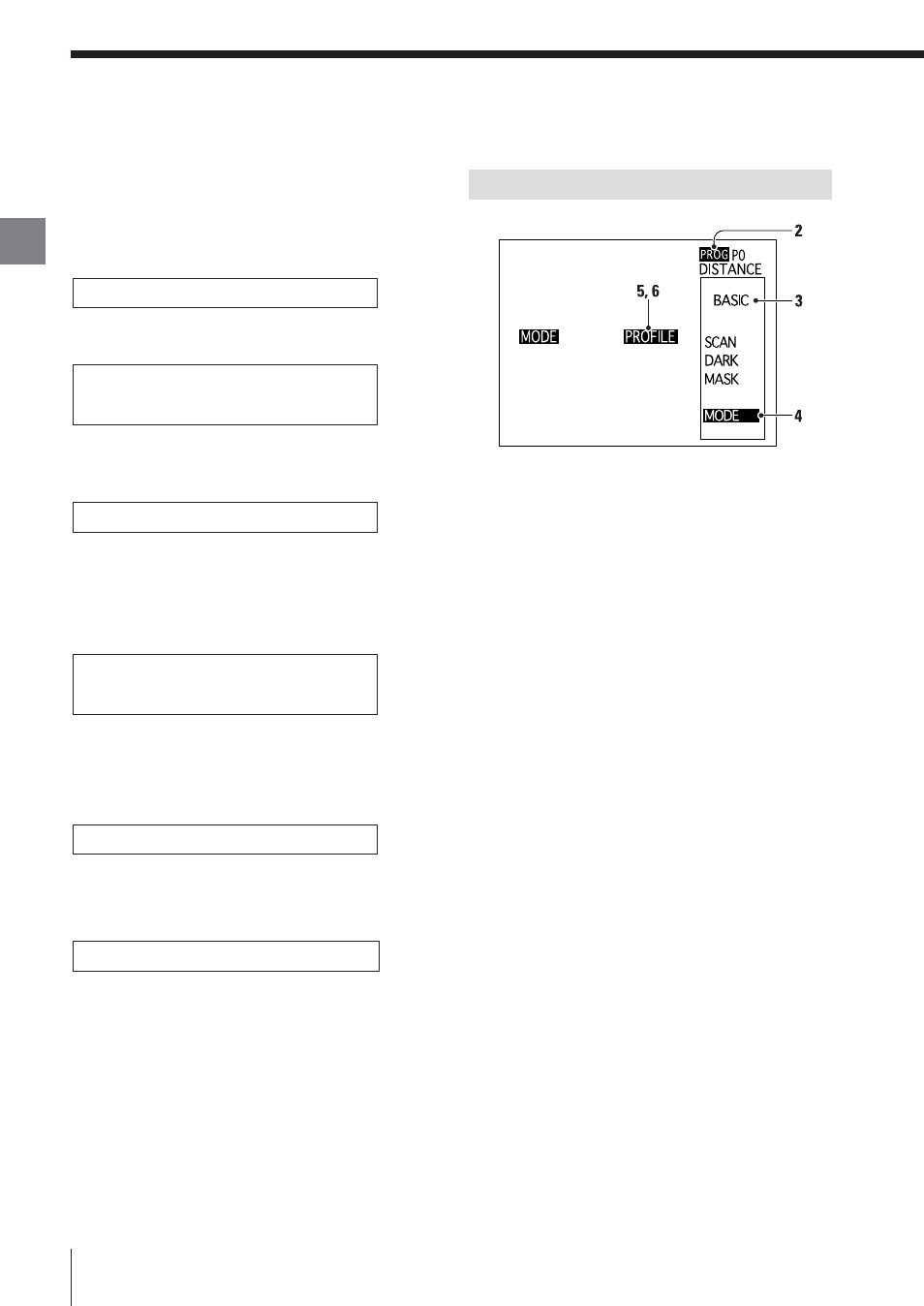
2
Slide the [PROG/RUN] switch downward on
the remote control console, and select the
program mode screen.
3
Select [BASIC] by using the [
▲] and [▼]
buttons and press the [ENTER] button.
The basic settings screen appears.
4
Place the cursor on [MODE] by using the [
▲]
and [
▼ ] buttons and press the [ENTER]
button.
The cursor moves to [MODE] on the mode
setting screen.
5
Press the [ENTER] button and move the
cursor to the mode currently selected.
When this setting is performed for the first time,
[DISTANCE] is displayed.
6
Select [PROFILE] by using the [
▲] and [▼]
buttons and press the [ENTER] button.
The run mode is changed.
7
Slide the [PROG/RUN] switch downward on
the remote console to display the run mode
screen.
Selecting the profile mode is completed.
Adjusting the distance between the measuring unit
and the measurement target is described next.
Selecting the Profile Mode
E LT-9001-IM
Basic
Operations
2
Chapter