IAI America MSCON User Manual
Page 280
Chapter 7 Parameter
272
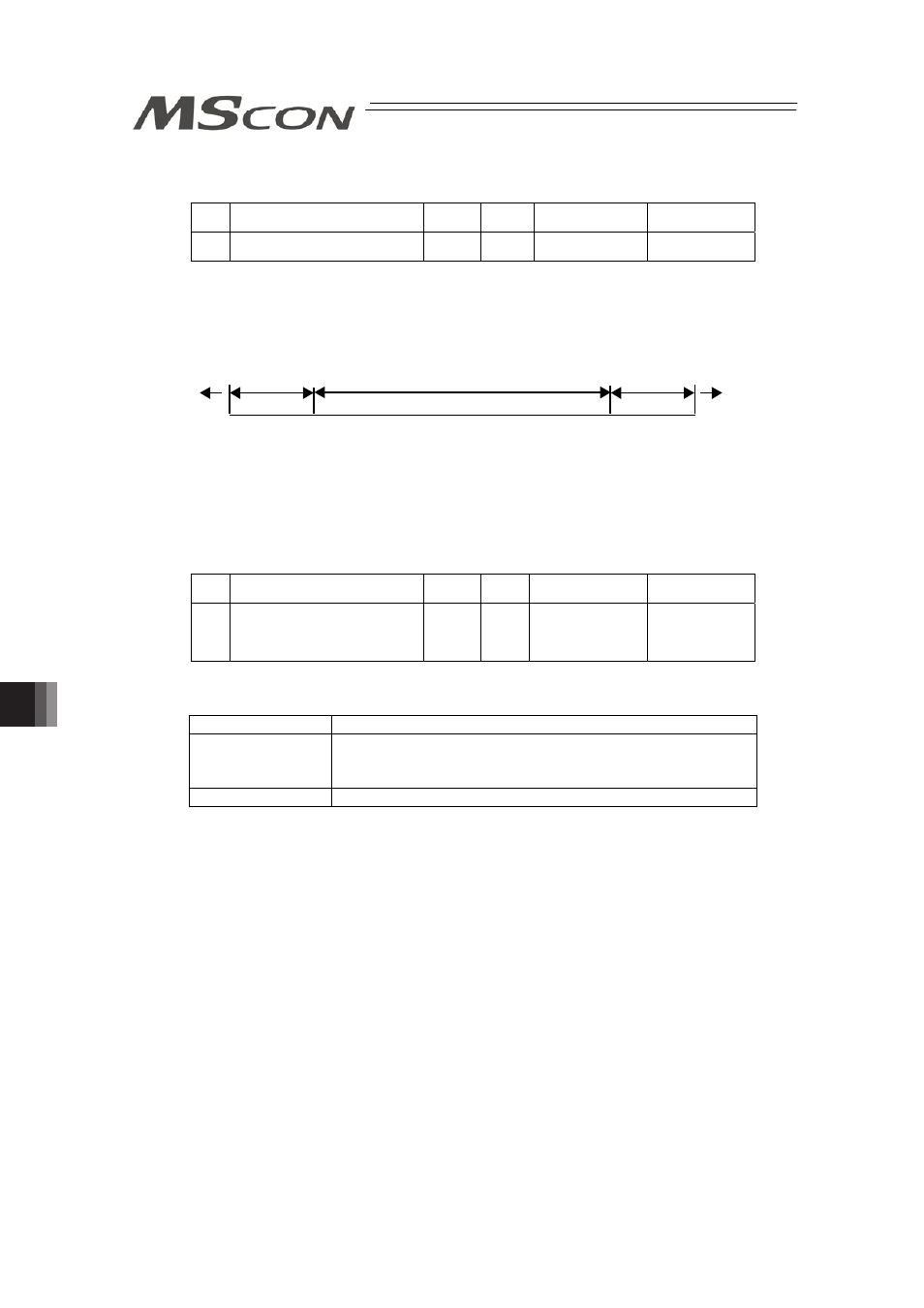
[49] Software limit margin (Parameter No.88)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
88 Software Limit Margin
SLMA
mm
0 to 9999.99
In accordance
with actuator
This is the parameter to set the position of over error detection against the soft limit errors set in
Parameters No.3 and No.4.
It is not necessary to change the setting in normal use.
[50] Allowable time of exceeding torque allowing continuous pressing (Parameter No.89)
This is the parameter for the future extension. Do not attempt to change the initial settings.
[51] Current limit value at stopping due to miss-pressing (Parameter No.91)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
91 Current Limit Value at Stopping
Due to Miss-pressing
FSTP
-
0: Current limit
during Movement
1: Current limit value
during pressing
0
This parameter defines the restricted current value at stopping due to miss-pressing.
This restricted current value locks the servo till the next moving command.
Parameter No.91
Description
0
Current limit value during movement
(2.8 to 4 times of rating value depending on actuator
characteristics)
1
Press-motion current-limiting value
[52] Use of loadcell selection (Parameter No.92)
This is the parameter for the future extension. Do not attempt to change the initial settings.
[53] Selection of pressing control (Parameter No.93)
This is the parameter for the future extension. Do not attempt to change the initial settings.
[54] Pressing operation using force sensor gain (Parameter No.94)
This is the parameter for the future extension. Do not attempt to change the initial settings.
[55] Positive and negative side of force judgment margin (Parameter No.95, No.96)
This is the parameter for the future extension. Do not attempt to change the initial settings.
Error
detection area
Software
limit margin
Soft limit (Parameter No.3, No.4) setting area
Software
limit margin
Error
detection area