IAI America MSCON User Manual
Page 166
3.7
Control and functions of Input and output signals of Modes other than Remote I/O Mode
Power Supply and Cutof
f
158
(15) Brake release (BKRL) PLC Output Signal
Operation
Mode
Positioner 1
Simple Direct
Direct numeric
specification
Direct numeric
specification 2
Positioner 2
Positioner 3
{
: Equipped
× : Not equipped
{
{
{
{
{
{
The brake can be released while BKRL signal is turned ON. For an actuator equipped with a
brake, the brake can be controlled automatically with the ON/OFF of the servo, however, it may
require to release the brake in such cases as when installing to the system or conducting Direct
Teach
*1
, when the slider or rod needs to be moved manually with hand. This operation also can
be performed with the brake release switch on the controller front panel, or by supplying 24V to
the brake power terminal on the control power connector.
*1 Direct Teaching: It is an operation to move the slider or rod manually with hand to read the
coordinate to the position table.
Warning: (1) Release the brake with a special care. Doing so carelessly may cause
an injury or a malfunction of actuator, work piece or other devices due to
a drop of the slider or rod.
(2) Make sure to put the setting back to activate the brake after releasing it.
It is extremely dangerous to perform operation with the brake open.
Drop of the slider or rod may cause injury or malfunction of actuator
body, work piece or system.
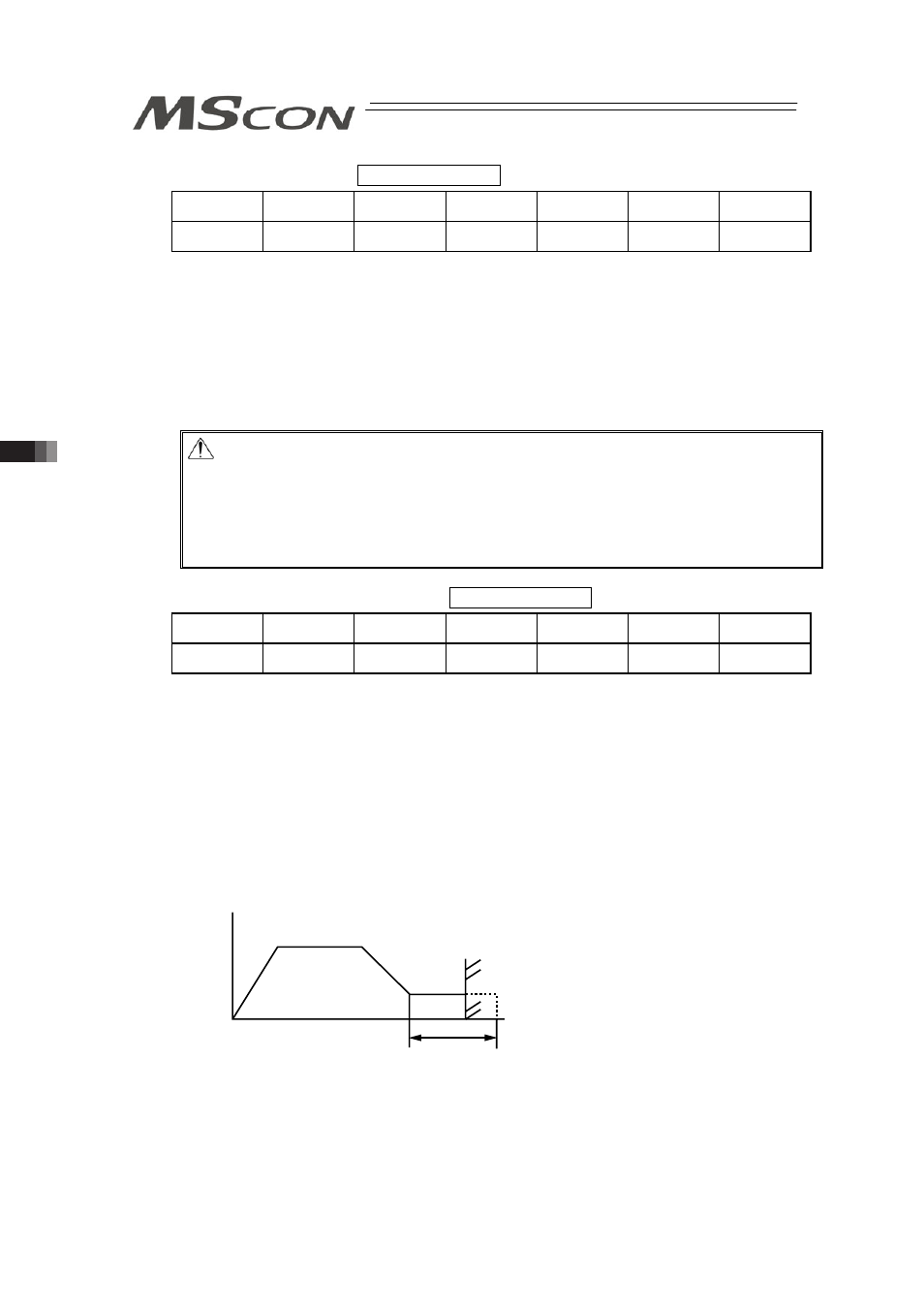
(16) Push-motion specification (PUSH) PLC Output Signal
Operation
Mode
Positioner 1
Simple Direct
Direct numeric
specification
Direct numeric
specification 2
Positioner 2
Positioner 3
{
: Equipped
× : Not equipped
Ч
Ч
{
{
Ч
Ч
When the movement command signal is output after this signal is turned ON, the pressing
operation is performed.
When this signal is set to OFF, the normal positioning operation is performed.
After reaching the target position
(Note 1)
from the current position, the actuator moves at the
pressing speed for only the distance set in the positioning width.
The positioning complete signal (PEND) turns ON if the work piece hits and pressing is judged
as completed while in the pressing operation.
Note 1: The value is that input in the target position register.
Speed
Movement distance
Target position
Positioning width (Max. pressing level)
Position where the actuator is pushed against
the work and the pressing completion is judged
so the positioning completion signal is turned “ON”
↓