Sample use – IAI America MSCON User Manual
Page 186
3.8 Control and functions of Input and output signals of Remote I/O Mode
178
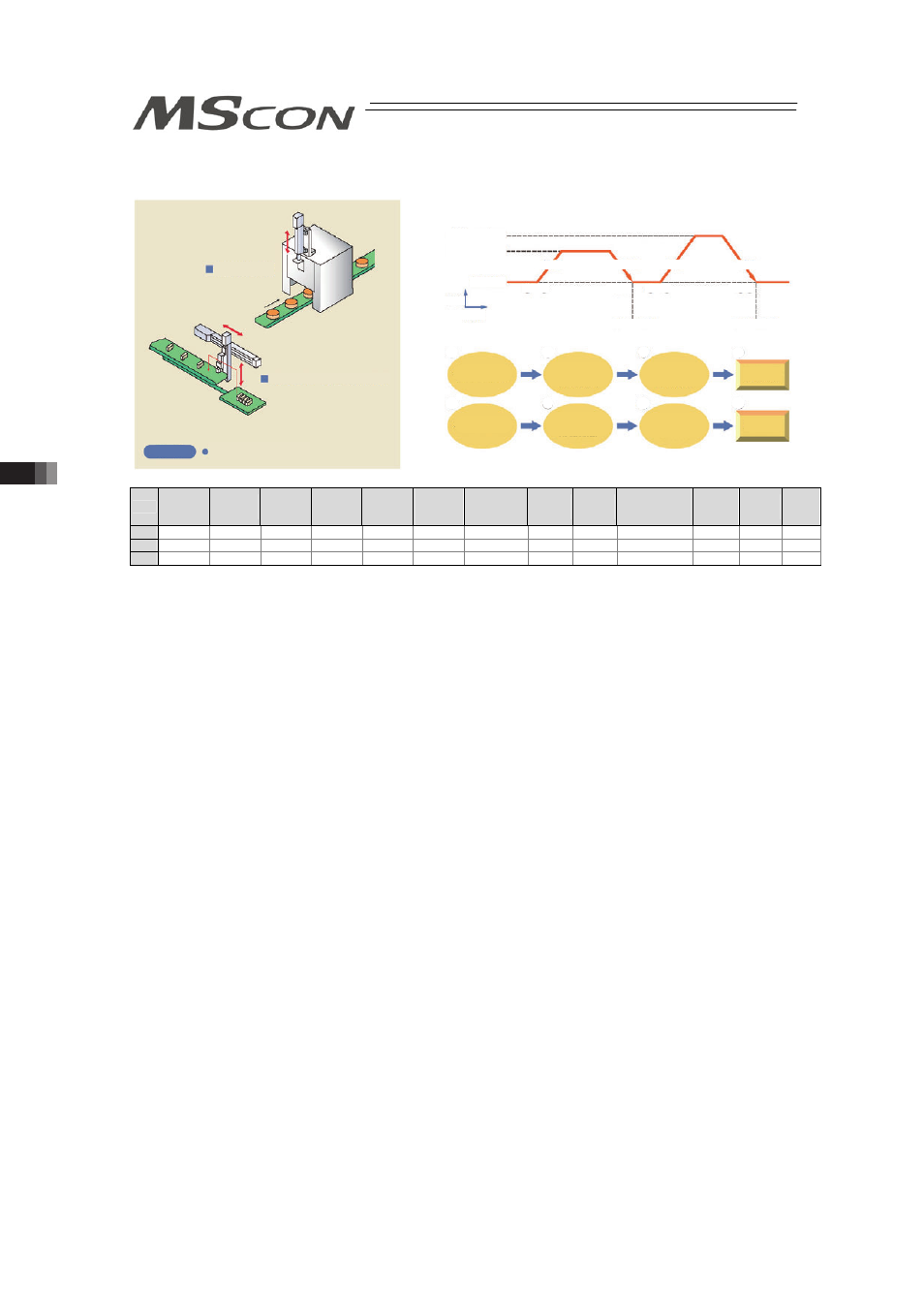
Sample use
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Gain
set
Stop
mode
0
1
70.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
Control method
1) First enter command position No. PC1 to PC** with binary data. Next turn start signal CSTR
ON. Then the actuator starts acceleration depending on the data in the specified position
table for positioning to the target position.
2) At operation start, positioning complete signal PEND is turned OFF. Always turn the CSTR
signal OFF. Without it, the completed position number is not output and the positioning
complete signal is not turned ON at the completion of positioning.
3) When the positioning is completed, the positioning complete position numbers are output
from complete position No.PM1 to PM** with binary data and also positioning complete
signal PEND is turned ON.
4) The moving signal MOVE turns ON at the same time as the operation starts, and turns OFF
once the positioning complete signal PEND turns ON or the movement command output
completes.
5) Positioning complete signal PEND is turned ON if the remaining moving distance enters into
the positioning width. PEND Signal will be kept ON once it is turned ON unless the start
signal CSTR is turned back ON, servo is turned OFF
(Note)
or the actuator is out of the
positioning band width range
(Note)
.
(Note) It can be switched over with Parameter No.39.
Used for door
open/close
Used for pick & place unit
Work carriage, movement, etc
Usage
Deceleration
Stop
status
Position 1
Acceleration
2)
3)
1)
4)
5)
Velocity
Time
Acceleration
Deceleration
Position 2
6)
7)
8)
2)
3)
1)
4)
5) 6)
7) 8)
200mm/sec
100mm/sec
Moving
comp.
Positioning
completion
signal output
Start signal
input (moving
start)
Position 1 input
Moving
comp.
Positioning
completion
signal output
Start signal
input (moving
start)
Position 2 input