Cm - command mode (aka control mode), Command details, Parameter details – Applied Motion RS-232 User Manual
Page 54
54
920-0002 Rev. I
2/2013
Host Command Reference
CM - Command Mode (AKA Control Mode)
Compatibility: All drives
Affects:
Drive mode of operation
See also:
PM command
Sets or requests the Command Mode that the drive operates in. For more automated setup of command modes
use the appropriate Configurator or Quick Tuner software application. The most common command mode is
Point-to-Point (21), in which all move commands can be executed. Move commands (like FL, FP, FS, and CJ) can
still be executed when the command mode is set to Step & Direction (7), because the drive will temporarily switch
to command mode 21 to execute the move, then revert back to command mode 7 when the move is finished.
However move commands are either ignored or do not function properly when the command mode is set to any
velocity mode (11-18) or the Analog Position mode (22).
WARNING: Changing the Command Mode without proper care may cause the motor to spin at a high rate of
speed or give other unexpected results. For this reason it is suggested that the appropriate Configurator or Quick
Tuner software application be used to test specific Command Modes first before changing them in the application
using the CM command.
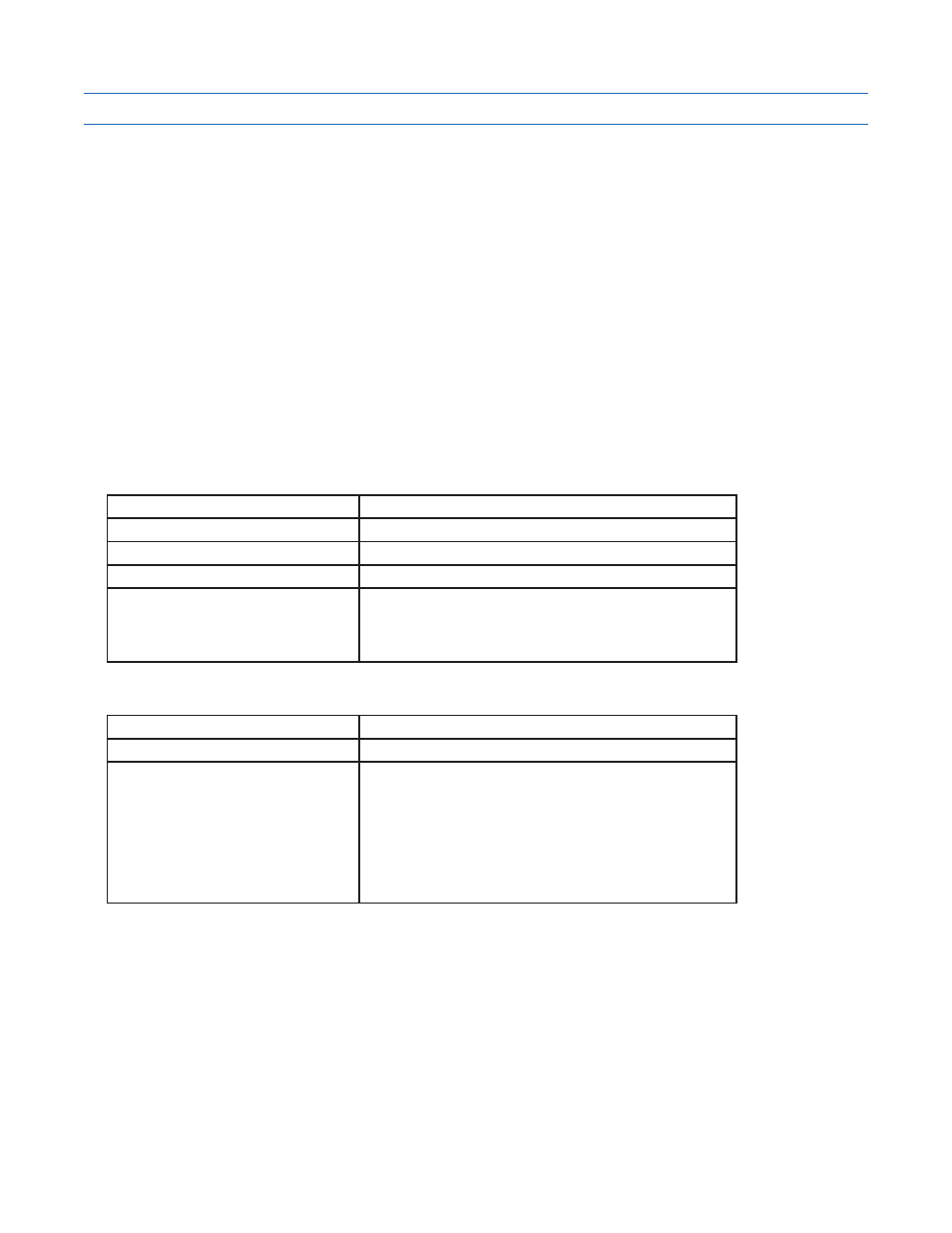
Command Details:
Structure
CM{Parameter #1}
Type
BUFFERED
Usage
READ/WRITE
Non-Volatile
YES
Register Access
“m” (061)
Note: Because a drive can change Command Mode on it’s
own to complete certain moves, the CM command and the
“m” register may not always match.
Parameter Details:
Parameter #1
Command mode
- units
integer code
- range
1 - Commanded Torque (servo only)
2 - Analog Torque (servo only)
7 - Step & Direction
10 - Commanded Velocity (jog mode)
11 - Analog velocity
12 to 18 - (see below)
21 - Point-to-Point
22 - Analog Position
NOTE: In Command Modes 11, 12, 13 and 14, input X2 will function to reverse the direction of motion.