Table 1: message type 1 command list – Applied Motion RS-232 User Manual
Page 296
296
920-0002 Rev. I
2/2013
Host Command Reference
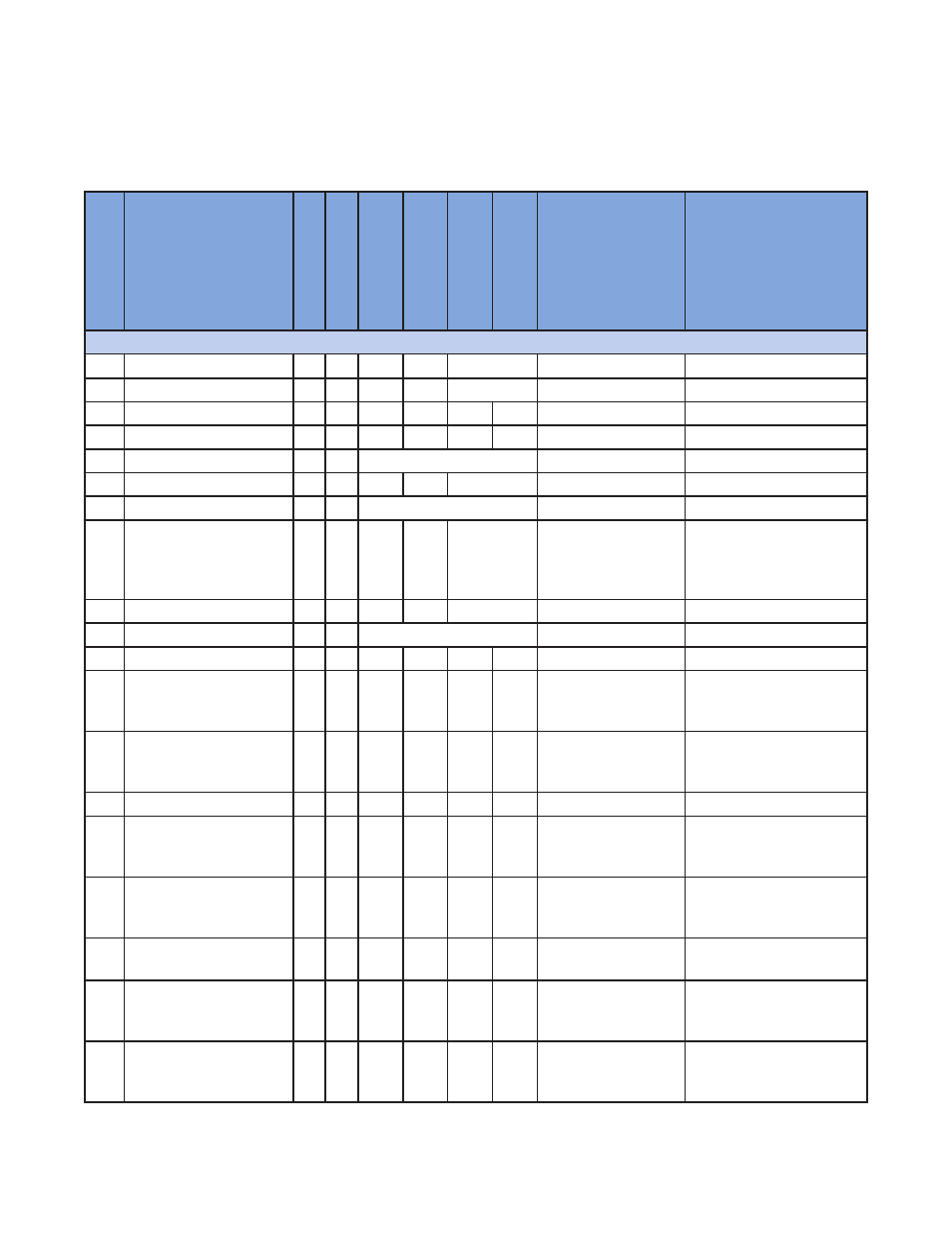
Table 1: Message Type 1 Command List
For detailed SCL and Q command descriptions, please see the main section of this manual. When reading
the command descriptions in the main part of this manual, please be advised that the EtherNet/IP encapsulation
often requires that different units, and a different range of acceptable values, be used.
Command
Description
opcode (hex)
Reg code
Parameter 1
Parameter 2
Parameter 3
Parameter 4
Range ST5 /
ST10 / ST
AC5
Units
Motion Commands
AC
P_TO_P_ACCEL,
1E 0
accel rate
1..32000
10 rpm/sec
AM
MAX_ACCEL,
16 0
accel rate
1..32000
10 rpm/sec
AX
ALARM_RESET
BA 0
CJ
START_JOGGING
96 0
DC
SET_CHNG_DISTANCE
B7 0
32 bit distance or position
+/-2,147,483,647
steps
DE
P_TO_P_DECEL,
1F 0
decel rate
1..32000
10 rpm/sec
DI
SET_REL_DISTANCE
B6 0
32 bit distance or position
+/-2,147,483,647
steps
EF
ENCODER_FUNCTION
D6 0
function
0,1,2 or 4
0 = Encoder function off
1 = Stall Detection
2 = Stall Prevention
4 = Stall prevention w/ time-out
EG
Steps/rev / 2
26 0
steps/rev
100..25600
steps/rev divided by 2
EP
ENCODER_POSITION
98 0
32 bit encoder position
+/-2,147,483,647
counts
FC
P_TO_P_CHANGE
6D 0
FD
feed to double sensor
69 0
cond
2
io2
cond
1
io1
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
FE
FOLLOW ENCODER
CC 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
FL
feed to length (relative move) 66 0
FM
Feed to Sensor with mask
distance
6A 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
FO
feed and set output
68 0
cond io
ST: Y1..Y4, L or H
STAC5: 1..4, Y1,Y2. L
or H
see IO Encoding Table
FP
feed to position (absolute
move)
67 0
FS
Feed to Sensor
6B 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
FY
Feed to Sensor with safety
distance
6C 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table