Pc - power-up current, Command details, Parameter details – Applied Motion RS-232 User Manual
Page 152: Examples
152
920-0002 Rev. I
2/2013
Host Command Reference
PC - Power-up Current
Compatibility: All drives
Affects:
Motor current and torque
See also:
CC, PI, PP commands
If using a stepper drive, PC sets or requests the continuous (RMS) current setting of the servo drive. If using
a servo drive, PC sets or requests the current setting (“peak of sine”) of the stepper drive, also known as the
running current.
NOTE: This command is similar to CC. It differs only in that in addition to setting the continuous current of the
drive, PC also immediately saves the setting to NV memory. See CC command for further details.
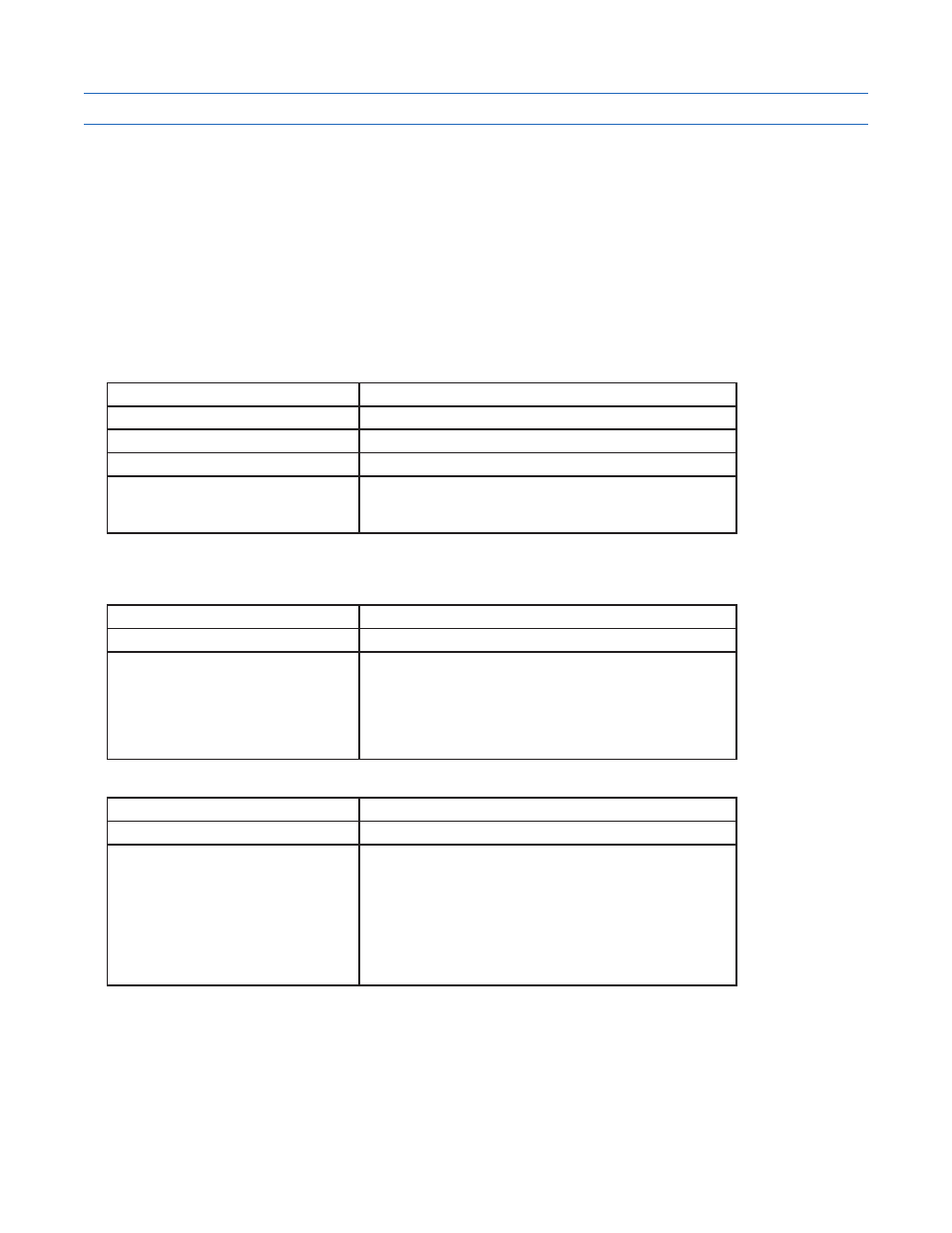
Command Details:
Structure
PC{Parameter #1}
Type
BUFFERED
Usage
READ/WRITE
Non-Volatile
Yes (see note below)
Register Access
“N” (030)
Note: The PC and CC commands use different units than
the “N” register; see Data Registers section for details
Parameter Details:
BLu, SV, SVAC3
Parameter #1
Power-up continuous current setting
- units
amps rms (resolution is 0.01 amps)
- range
BLuDC4: 0 - 4.5
BLuDC9: 0 - 9.0
BLuAC5: 0 - 5.0
SV: 0 - 7.0
SVAC3 (120V): 0 - 3.5
SVAC3 (220V): 0 - 1.8
STAC6, ST-Q/Si, ST-S, STM, STAC5
Parameter #1
Running current
- units
amps (resolution is 0.01 amps)
- range
STAC6: 0 - 6.0
ST5 : 0 - 5.0
ST10: 0 - 10.0
STM17: 0 - 2.0
STM23: 0 - 5.0
STM24: 0 - 6.0
STAC5 (120V): 0 - 5
STAC5 (220V): 0 - 2.55
NOTE: Applied Motion recommends using Configurator software to select a motor and set the maximum current.
Examples:
Command
Drive sends
Notes
PC3.2
-
Set power-up continuous current to 3.2 amps RMS for servo drive or 3.2
amps running current for stepper drive
PC PC=3.2