Sp - set position, Command details, Parameter details – Applied Motion RS-232 User Manual
Page 205: Examples
205
920-0002 Rev. I
2/2013
Host Command Reference
SP - Set Position
Compatibility: All drives
Affects:
FP commands
See Also:
EP, FP commands
Sets or requests the motor’s absolute position. To ensure that the internal position counter resets properly, use
EP immediately prior to sending SP. For example, to set the position to zero after a homing routine, send EP0
immediately followed by SP0.
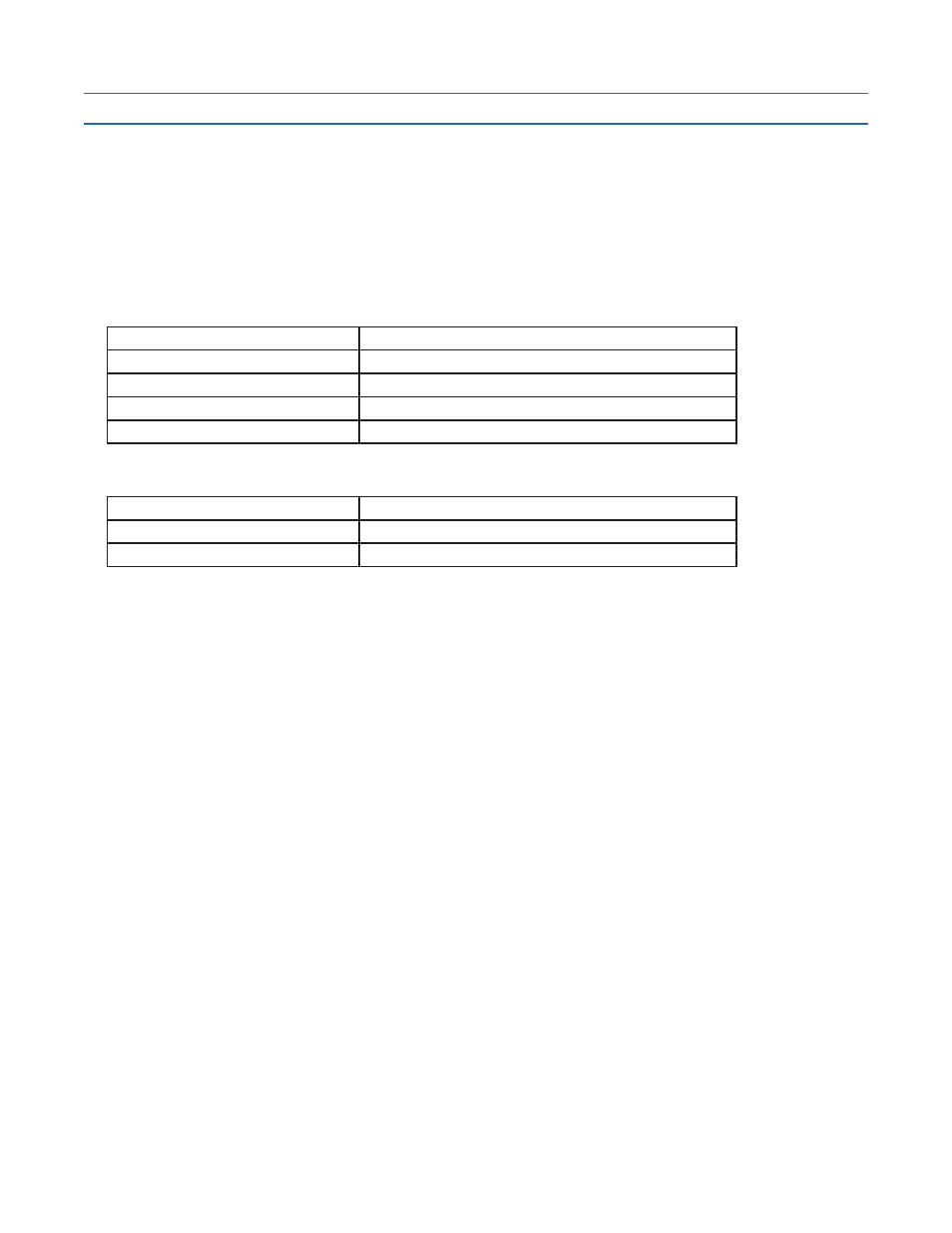
Command Details:
Structure
SP{Parameter #1}
Type
BUFFERED
Usage
READ/WRITE
Non-Volatile
NO
Register Access
None
Parameter Details:
Parameter #1
Absolute position
- units
encoder counts
- range
+/- 2,147,483,647
Examples:
Command
Drive sends
Notes
SP100
-
Set absolute position offset to 100 encoder counts
SP SP=100
EP0
-
(Step 1) reset internal position counter
SP0
-
(Step 2) reset internal position counter