Applied Motion RS-232 User Manual
Page 297
297
920-0002 Rev. I
2/2013
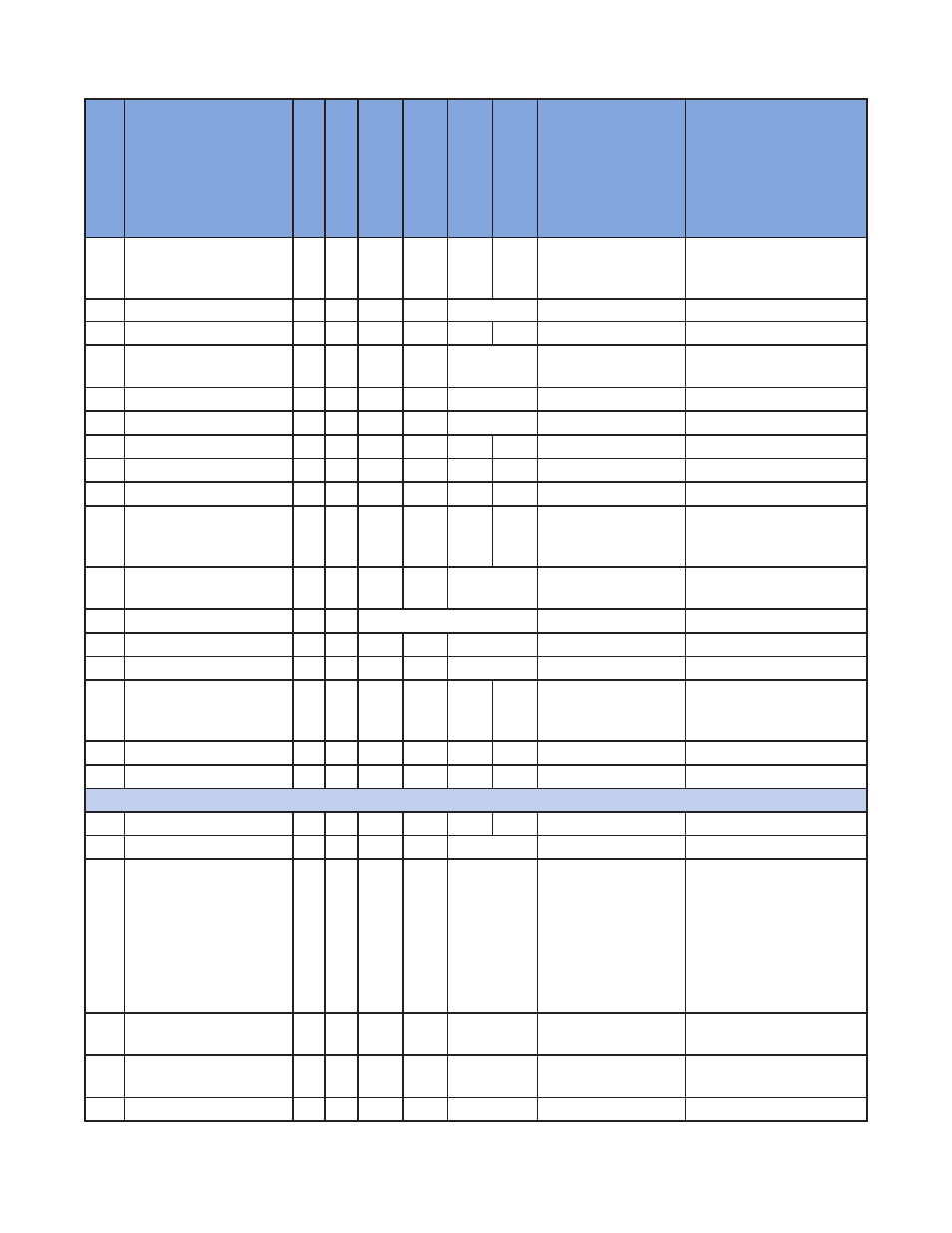
Host Command Reference
Command
Description
opcode (hex)
Reg code
Parameter 1
Parameter 2
Parameter 3
Parameter 4
Range ST5 /
ST10 / ST
AC5
Units
HW
Hand wheel
AB 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
JA
VM_ACCEL,
1B 0
jog accel rate 1..32000
10 rpm/sec
JD
JOG_DISABLE
A3 0
JE
JOG_ENABLE
A2 0
direction
1=cw enable, 2=ccw
enable, 3=both
JL
VM_DECEL,
1C 0
jog decel rate 1..32000
10 rpm/sec
JS
VM_VELOCITY,
1A 0
jog speed
0..32000
.25 rpm
MD
MOTOR_DISABLE
9E 0
ME
MOTOR_ENABLE
9F 0
MT
Multi Tasking
A9 0
0
0 or 1 0 or 1
1=on, 0=off
SH
SEEK_HOME, ionum+cond 6E 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
SM
STOP_MOVING
B5 0
decel code
D (DE rate) or M (AM
rate)
‘D’ or ‘M’
SP
SET_ABS_POSITION
A5 0
32 bit abs position
+/-2,147,483,647
steps
VC
CHANGE_VELOCITY,
4A 0
speed
1..32000
.25 rpm
VE
P_TO_P_VELOCITY,
1D 0
speed
1..32000
.25 rpm
WI
Wait for Input
70 0
cond io
ST: X0..X8, L/H/F/R
STAC5: X0..X4, 1..8.
L/H/F/R
see IO Encoding Table
WM WAIT_ON_MOVE
BC 0
WP
WAIT_ON_POSITION
D0 0
Configuration Commands
--
RESTORE_DEFAULTS
A6
AD
Analog Deadband
D2 0
dead band
0..255
millivolts
AS
Analog Scaling
D1 0
scale code
0..7
0 = single-ended +/- 10 volts
1 = single-ended 0 - 10 volts
2 = single-ended +/- 5 volts
3 = single-ended 0 - 5 volts
4 = differential +/- 10 volts
5 = differential 0 - 10 volts
6 = differential +/- 5 volts
7 = differential 0 - 5 volts
BD
BRAKE RELEASE DELAY
40 0
brake release
delay
1..32000
msec
BE
BRAKE ENGAGE DELAY
41 0
brake engage
delay
1..32000
msec
CA
ACCEL_CURRENT,
61 0
accel current
not supported
10 rpm/sec