Applied Motion RS-232 User Manual
Page 289
289
920-0002 Rev. I
2/2013
Host Command Reference
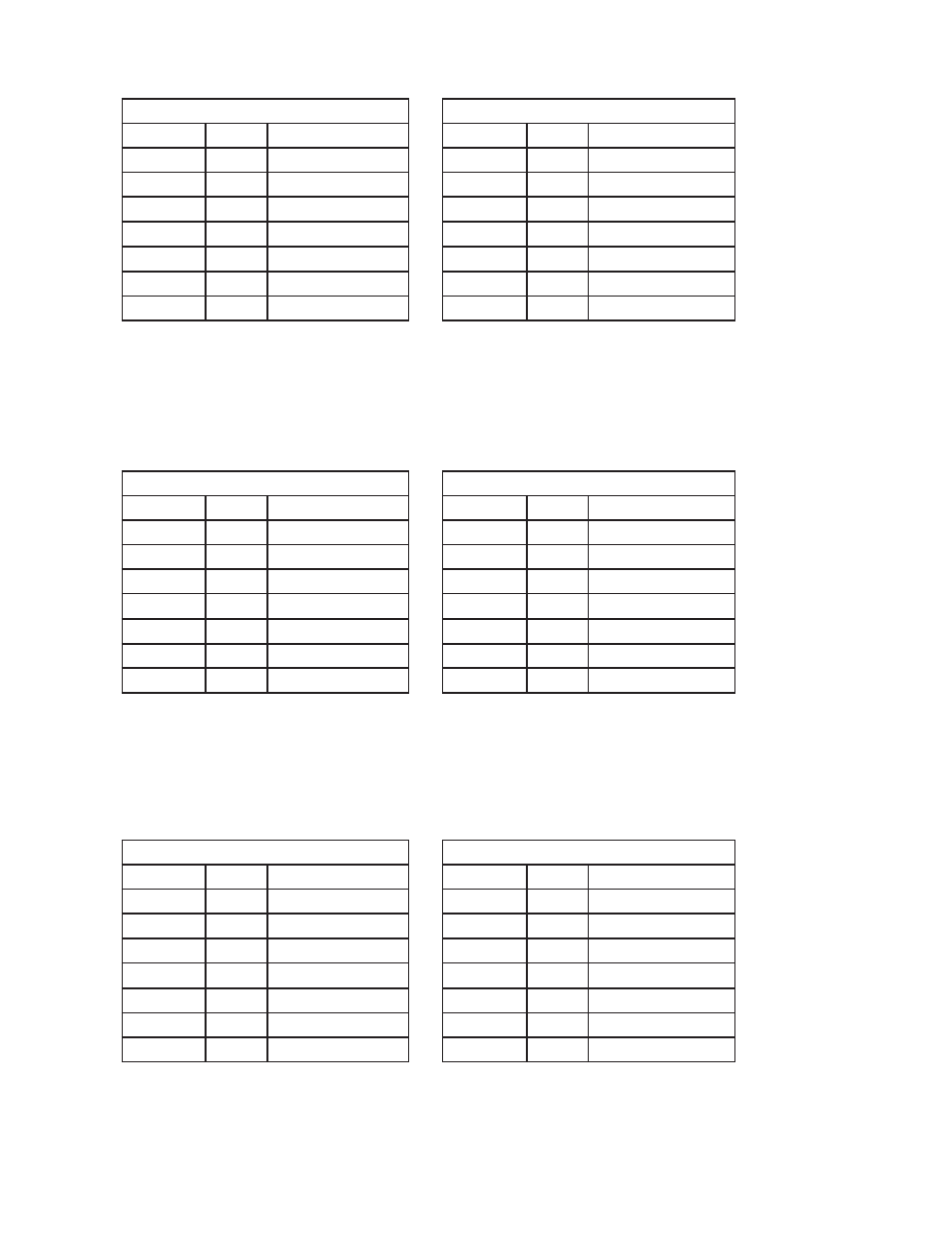
Type 1 Command Message Payload
Type 1 Response Message Payload
byte 0
0
reserved
byte 0
0
reserved
byte 1
1
message type
byte 1
1
message type
byte 2
0
not used
byte 2
0
not used
byte 3
8B
opcode
byte 3
8B
opcode
byte 4
0
not used
byte 4
?
Status Code MSB
byte 5
0
not used
byte 5
?
Status Code LSB
byte 6
4C
operand MSB
byte 6
0
not used
byte 7
B2
operand LSB
byte 7
0
not used
Example 3: enabling the motor
ME motor
enable
opcode
0x009F
from
Table
1
operand 0
no operand
Type 1 Command Message Payload
Type 1 Response Message Payload
byte 0
0
reserved
byte 0
0
reserved
byte 1
1
message type
byte 1
1
message type
byte 2
0
unused
byte 2
0
unused
byte 3
9F
opcode
byte 3
9F
opcode
byte 4
0
not used
byte 4
?
Status Code MSB
byte 5
0
not used
byte 5
?
Status Code LSB
byte 6
0
not used
byte 6
0
not used
byte 7
0
not used
byte 7
0
not used
Example 4: SCL commands required for Feed to Sensor move
AC200
set acceleration rate to 200 rev/sec/sec (12000 rpm/sec)
opcode
0x001E
from
Table
1
operand 0x4B0 units are 10 rpm/sec, so 12000 rpm/sec is represented by 1200 decimal = 4B0 hex
Type 1 Command Message Payload
Type 1 Response Message Payload
byte 0
0
reserved
byte 0
0
reserved
byte 1
1
message type
byte 1
1
message type
byte 2
0
unused
byte 2
0
unused
byte 3
1E
opcode
byte 3
1E
opcode
byte 4
0
unused
byte 4
?
Status Code MSB
byte 5
0
unused
byte 5
?
Status Code LSB
byte 6
4
operand MSB
byte 6
0
not used
byte 7
B0
operand LSB
byte 7
0
not used
DE150
set deceleration rate to 150 rev/sec/sec (9000 rpm/sec)
opcode
0x001F from Table 1