Status code definitions sc command – Applied Motion RS-232 User Manual
Page 254
254
920-0002 Rev. I
2/2013
Host Command Reference
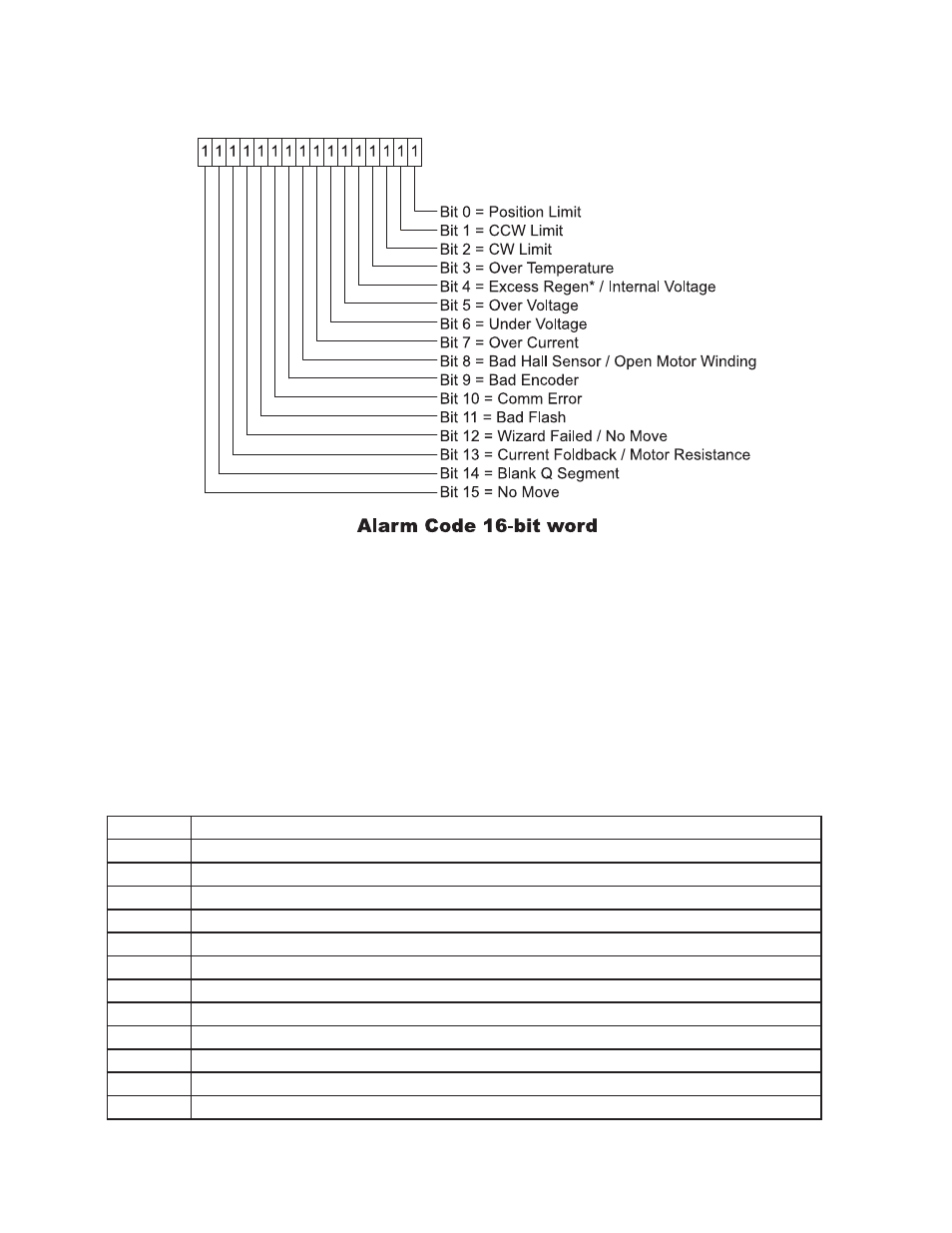
shows the 16 bit assignments for the Alarm Code (which of course match the hexadecimal values above).
Example: The drive has hit the CW limit (bit 2), there is an under voltage condition (bit 6), and an encoder
wiring connection has been lost resulting in an encoder fault (bit 9). The resulting Alarm Code binary word is 0000
0010 0100 0100. The decimal equivalent of this word is 580, so the response from the drive to the RLf command
will be “RLf=580”.
Status Code Definitions
SC command
When a host sends the SC command, the response from the drive will be the Hexadecimal equivalent of
a 16-bit word. This hexadecimal value is considered the Status Code, and the hexadecimal value for each of
the bits in the Status Code is given below. When a host sends the SC command, the response from the drive
will actually be the Hexadecimal equivalent of this 16-bit word. This hexadecimal value is considered the Status
Code, and the equivalent hexadecimal value for each of the bits is given below.
Hex Value
Status Code bit definition
0001
Motor Enabled (Motor Disabled if this bit = 0)
0002
Sampling (for Quick Tuner)
0004
Drive Fault (check Alarm Code)
0008
In Position (motor is in position)
0010
Moving (motor is moving)
0020
Jogging (currently in jog mode)
0040
Stopping (in the process of stopping from a stop command)
0080
Waiting for an input (executing WI command)
0100
Saving (parameter data is being saved)
0200
Alarm present (check Alarm Code)
0400
Homing (executing an SH command)
0800
Wait Time (executing a WT command)