Cross cutter, Features of the "cross cutter" prepared solution – Lenze EVS93xx CrossCutter User Manual
Page 73
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-59
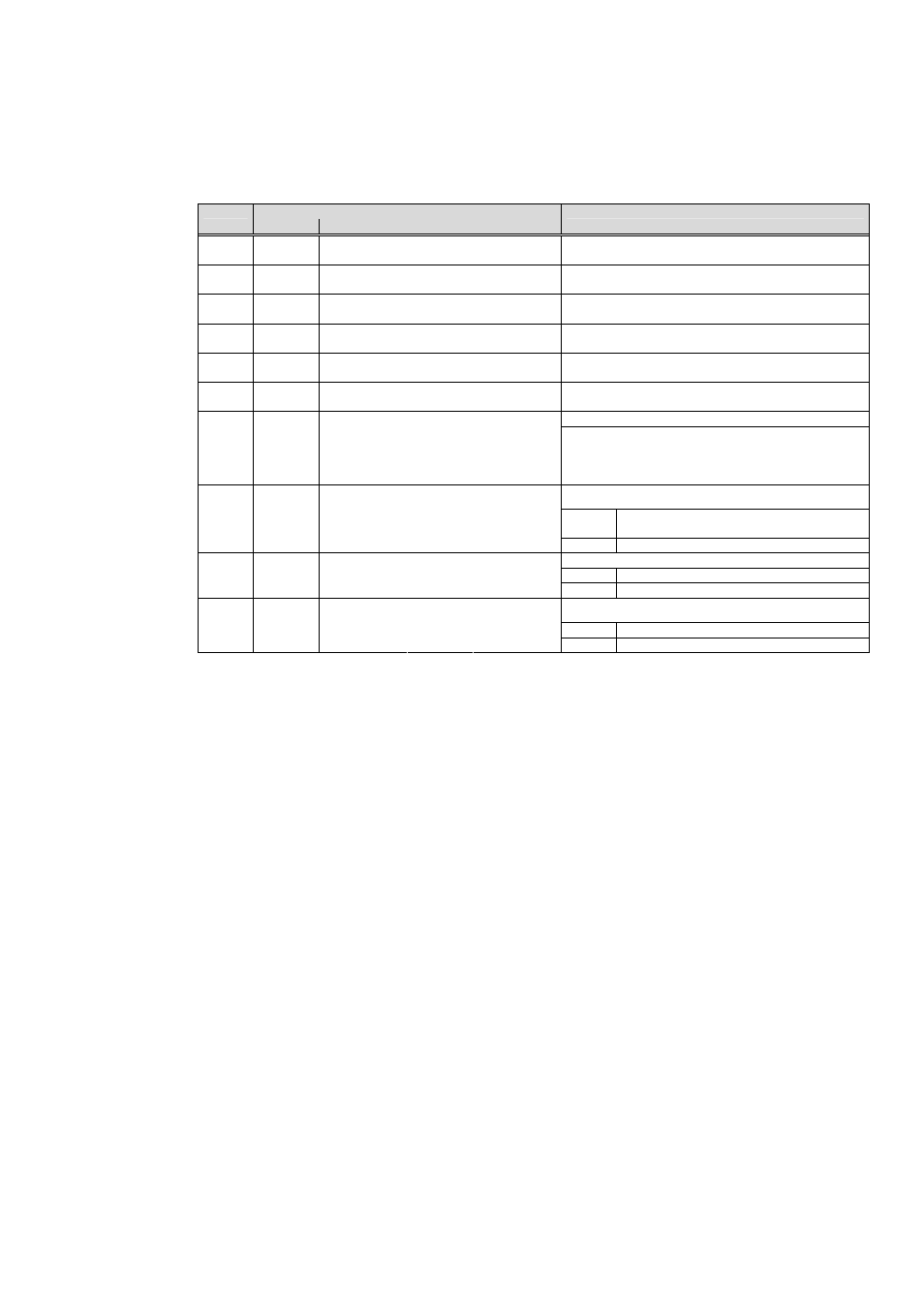
Possible settings:
Code
Default
Selection
Comment
C3620/
001
5.00 0.01…
{0.01[s]}
...129.99 Deceleration ramp for immediate stop
Assuming 4000 rpm
C3620/
002
5.00 0.01…
{0.01[s]}
...129.99 Acceleration ramp for positioning
Assuming 4000 rpm
C3620/
003
5.00 0.01…
{0.01[s]}
...129.99 Deceleration ramp for positioning
Assuming 4000 rpm
C3621/
001
200
0 ...
{1 rpm}
...15000 Speed for positioning in positive direction (CW)
C3621/
002
200
0 ...
{1 rpm}
...15000 Speed for positioning in negative direction (CCW)
C3628/
000
0.0000 0
{0.0001
[s_units]}
360.0000 Target position of positioning
Positioning mode
C3629/
000
0 0
{1}
4
0 = Move to target position via shortest route.
1 = Move to target position only in positive direction (CW).
2 = Move to target position only in negative direction (CCW).
4 = Positioning relative to entry in g_dnToolPositionSet(_p).
Application control word bit 5: Execute positioning.
TRUE
The drive is moved to the target position along the
set ramps and at the set speed.
C4135/
000
Bit 5
0
0 {1} 1
FALSE Positioning
interrupted.
Application status word bit 3: Positioning in progress.
TRUE
Positioning in progress.
C4150/
000
Bit 3
-
- - -
FALSE
Positioning not in progress.
Application status word bit 4: Target position reached.
TRUE
Target position reached.
C4150/
000
Bit 4
-
- - -
FALSE
Target position not reached.
To illustrate the positioning function, a graph showing the signal characteristic of a positioning
operation appears on the following page. The "StandBy", "Positioning" and "Trouble" states
shown are displayed in code C3505 or global variable g_nTemplateState.