Variable names, Cross cutter, Features of the "cross cutter" prepared solution – Lenze EVS93xx CrossCutter User Manual
Page 72
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-58
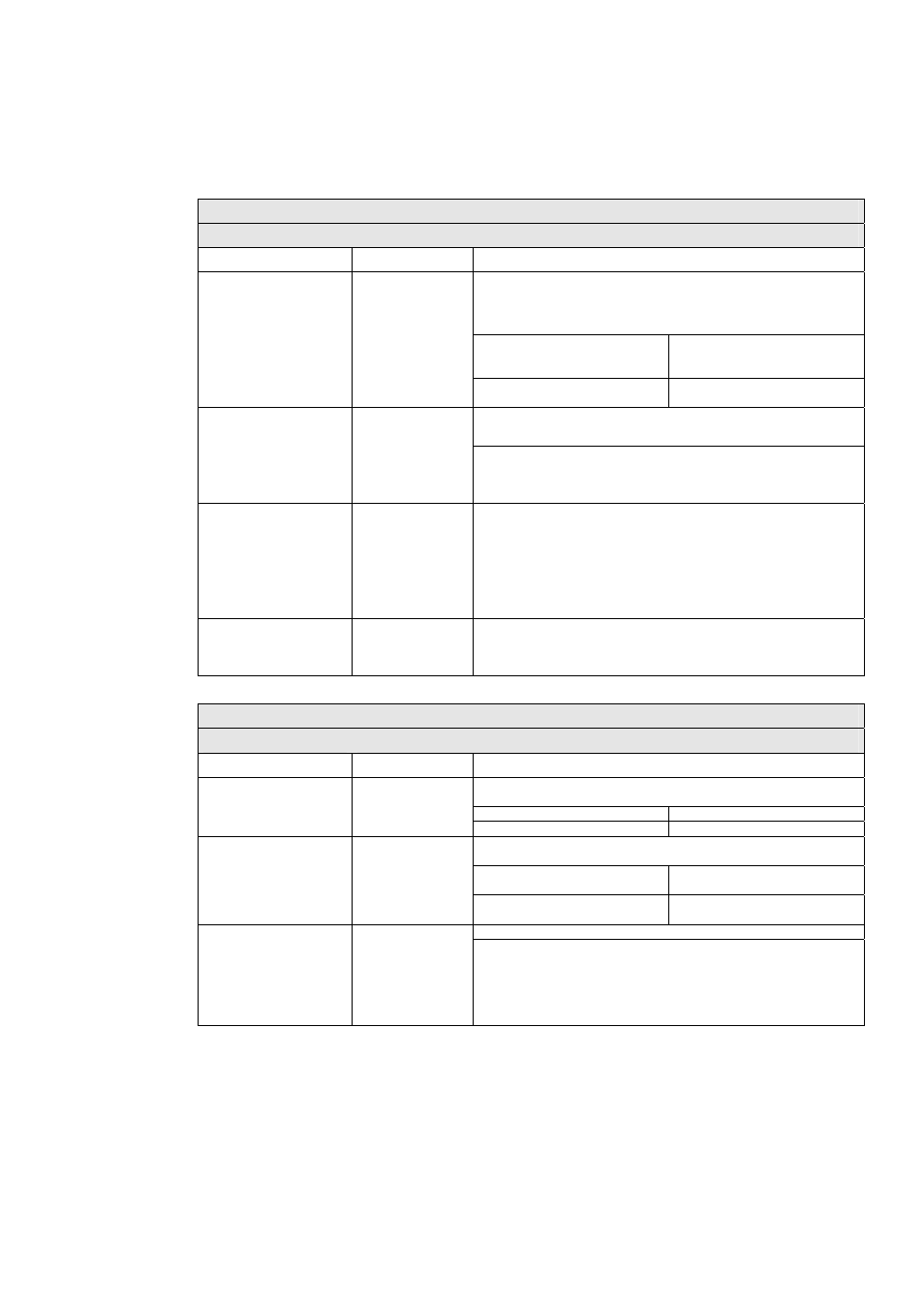
Variable
names
Inputs
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
Execute positioning.
This value is written in code C4135/000 bit 5.
This value is displayed in code C4136/000 bit 5.
TRUE
The drive is moved to the target position
g_dnToolPositionSet(_p) along the set
ramps and at the set speed.
g_bMotionStart BOOL
FALSE
Positioning interrupted.
Positioning mode
This value is written/displayed in C3629/000.
g_byPositioningModeCode
BYTE
0 = Move to target position via shortest route.
1 = Move to target position only in positive direction (CW).
2 = Move to target position only in negative direction (CCW).
4 = Positioning relative to entry in g_dnToolPositionSet(_p).
g_dnToolPositionSet
DINT
Target position in [unit]
With reference to the machine zero point.
The value is entered in fixed point format with 4 decimal positions (1 [unit] = 10000).
The
value is converted into increments internally.
If you use this variable, to avoid inconsistencies, do not write variable
g_dnToolPositionSet_p!
This value is displayed in code C3628/000; this variable can be written to this code.
g_dnToolPositionSet_p
DINT
Target position in [incr.]
With reference to the machine zero point.
If you use this variable, to avoid inconsistencies, do not write variable
g_dnToolPositionSet!
Outputs
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
"Positioning in progress" status signal
This value is displayed in code C4150/000 bit 3.
TRUE
Positioning in progress.
g_bToolPositioningBusy
BOOL
FALSE
Positioning not in progress.
"Target position reached" status signal
This value is displayed in code C4150/000 bit 4.
TRUE
Target position g_dnToolPositionSet(_p)
reached.
g_bToolPositioningDone
BOOL
FALSE Target
position
g_dnToolPositionSet(_p)
not reached.
Status of positioning:
g_wPosProfilerState
WORD
0 = NoAction
1 = PositioningDone
Target position g_dnToolPositionSet(_p)
reached.
13 = PositioningBusy
Positioning in progress.
14 = PositioningToCamBusy
Positioning to cam in progress.
102 = AbortIsActive
Positioning aborted.