Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 64
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-50
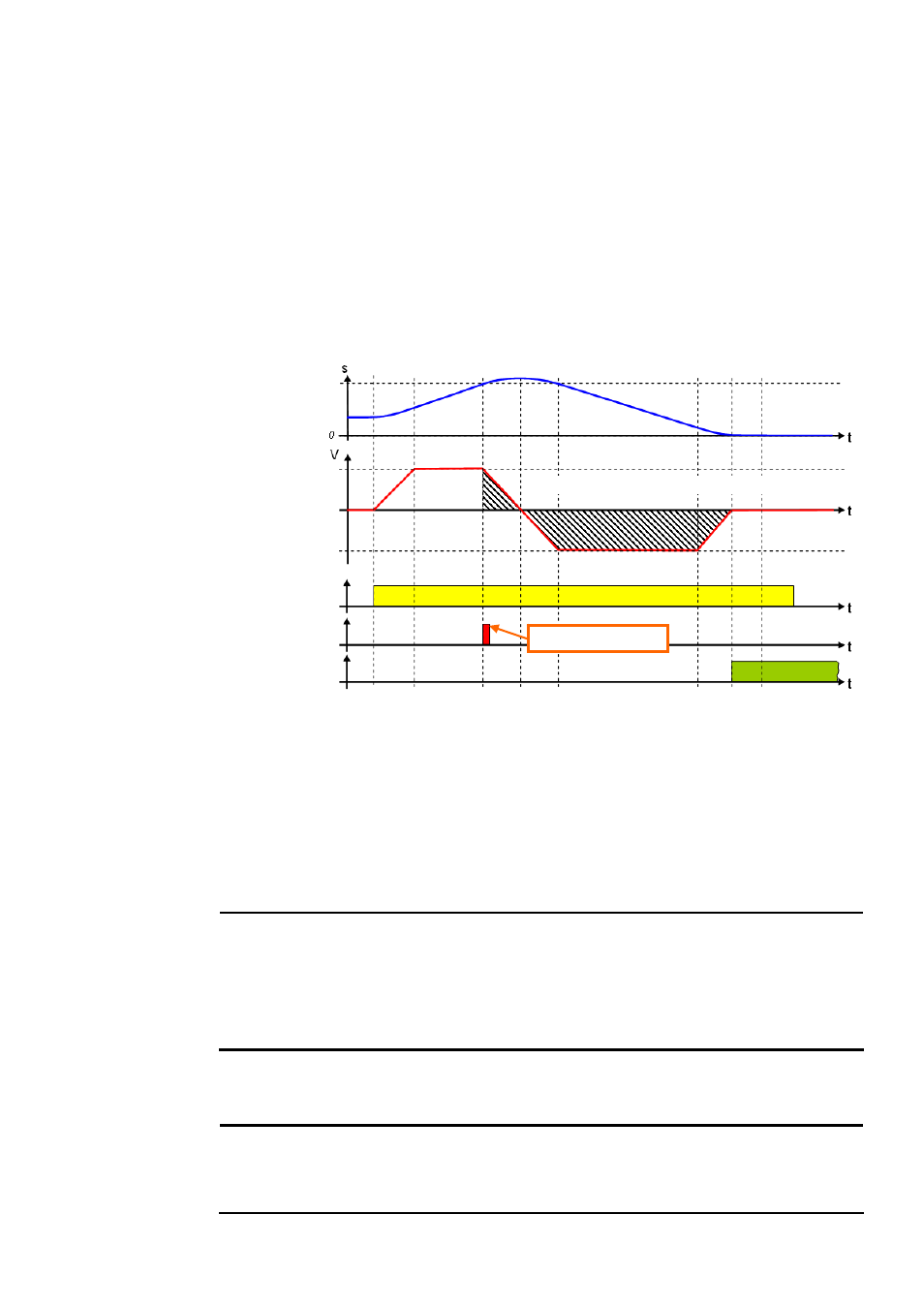
• Homing mode 8:
The drive rotates in a positive direction (clockwise rotation) until a touch-probe signal is
detected at the assigned digital input. This determines the home position (machine zero
point).
If you do not wish the home position to be the zero point of the absolute measuring system
used, you can use an offset value (machine zero distance, C3626/000) to set the home
position to the zero point of the measuring system. Once homing is complete the drive will
stop at position 0.0000[s_units]:
Figure 15: Graph of homing mode 8
In the example illustrated above, the home position has a positive value with reference to the
measuring system zero point, because once the zero pulse/touch-probe signal has been
detected, the drive reverses and moves back to the measuring system zero point
(0.0000[s_units]).
If you do not wish homing to end at the measuring system zero point, you can in addition
preset an end position to come after homing (homing target position, C3627/000). This
provides the requisite conditions for setting the measuring system zero point outside the
drive's traversing range.
TIP!
If a value of 345° is written to C3626 (position of the homing switch) and 165° to C3627
(target position after homing), the drive will first move in a positive direction to the homing
switch before reversing in order to position itself at the target position after homing (165°).
To prevent the drive reversing, write a value of -15° to C3626 instead of 345° (the drive will
then move in a positive direction to the homing switch before continuing in a positive
direction to 165° (C3627)).
• Homing mode 9:
(like homing mode 8 but with a negative traversing direction)
TIP!
Instead of the touch-probe signal via digital input (I4 using Servo PLC and I2 using ECS),
the zero pulse signal from the feedback system can also be used as the signal to determine
the home position (however, this is not standard practice in modes 8 and 9).
Zero pulse feedback
or
Touch-probe signal
Control signal
"Homing"
Status signal
"Home position
detected”
Homing speed
Home position
Touch-probe signal
g_dnMachineZeroDistance (C3626/000)