Variable names, Cross cutter, Features of the "cross cutter" prepared solution – Lenze EVS93xx CrossCutter User Manual
Page 58
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-44
)
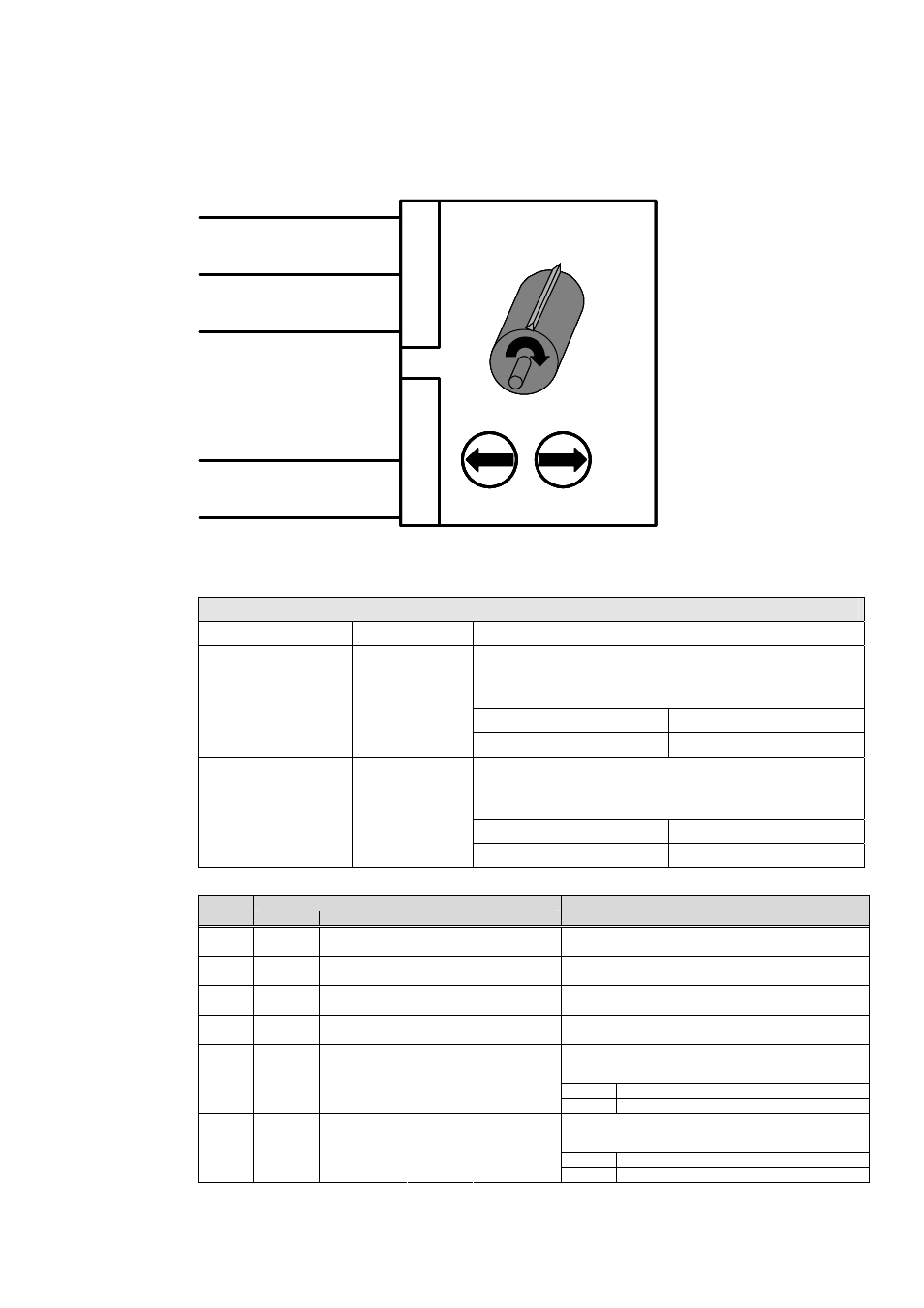
g_bManualJogNeg
g_bManualJogPos
Ramp Time: C3622/1..3
Speed: C3623/1..2
ManualJog
g_bGlobalError
In
pu
ts
Pa
ra
m
et
er
)
g_bManualJogNeg
g_bManualJogPos
Ramp Time: C3622/1..3
Speed: C3623/1..2
ManualJog
g_bGlobalError
In
pu
ts
Pa
ra
m
et
er
Figure 9: Control signals in ManualJog
Variable
names
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
Manual jog in negative direction (CCW)
This value is written in code C4135/000 bit 4.
This value is displayed in code C4136/000 bit 4.
TRUE
Manual jog in negative direction
g_bManualJogNeg BOOL
FALSE Stop
Manual jog in positive direction (CW)
This value is written in code C4135/000 bit 3.
This value is displayed in code C4136/000 bit 3.
TRUE
Manual jog in positive direction
g_bManualJogPos BOOL
FALSE Stop
Possible settings:
Code
Default
Selection
Comment
C3622
/001
5.000 0.000...
{0.0001[s]}
...129.99
Deceleration ramp for immediate stop
Assuming 4000 rpm
C3622
/003
5.000 0.000...
{0.0001[s]}
...129.99
Acceleration and deceleration ramp for manual jog
Assuming 4000 rpm
C3623
/001
200 0
...
{1 rpm}
...15000
Speed for manual jog in positive direction (CW)
C3623
/002
200 0
...
{1 rpm}
...15000
Speed for manual jog in negative direction (CCW)
Application control word bit 3: Manual jog in positive direction
(CW)
TRUE
Manual jog in positive direction
C4135
/000
Bit 3
0
0 {1} 1
FALSE Stop
Application control word bit 4: Manual jog in negative direction
(CCW)
TRUE
Manual jog in negative direction
C4135
/000
Bit 4
0
0 {1} 1
FALSE Stop