Variable names, 6 homing, Homing -46 – Lenze EVS93xx CrossCutter User Manual
Page 60: Cross cutter, Features of the "cross cutter" prepared solution
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-46
Variable
names
Possible settings:
Code
Default
Selection
Comments
C3643/
000
3.0000
0.0001... {0.0001
[s_units]}
... 214748.0000 Following error switch-off threshold
C3644/
000
0.5000
0.0001... {0.0001
[s_units]}
... 214748.0000 Following error hysteresis
C3645/
000
1.5000
0.0001... {0.0001
[s_units]}
... 214748.0000 Following error warning limit
C3646/
000
0.5000
0.0001... {0.0001
[s_units]}
... 214748.0000 Following error warning limit hysteresis
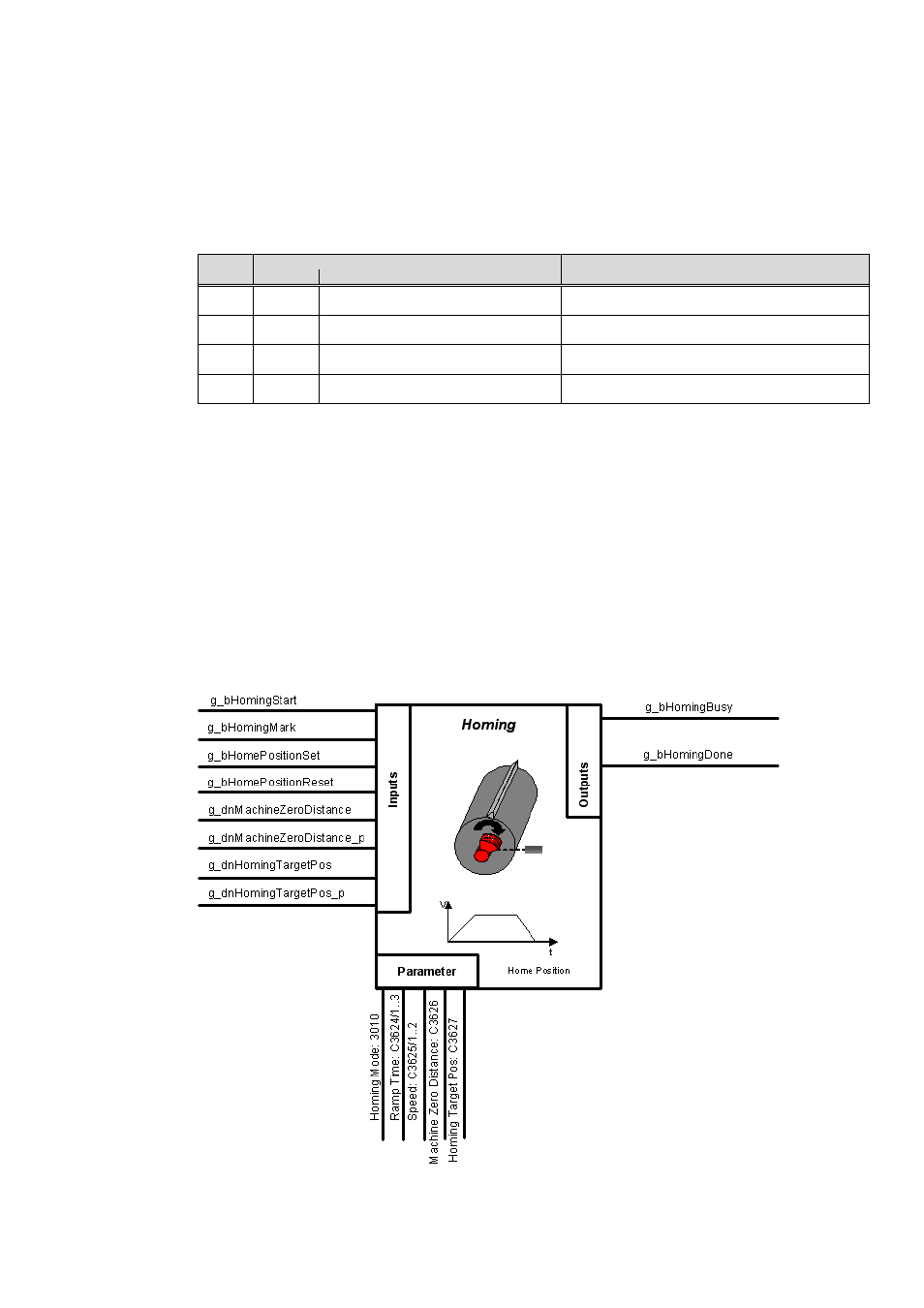
2.5.6 Homing
This function can be used to perform homing. The drive moves in a preselected mode and
calculates the zero position (home) automatically on the basis of a home mark before declaring
this value to the drive control. All position data refers to this home position.
Homing is generally
performed once following mains connection.
The following can be used as home mark signals:
• Zero pulse (signal edge from encoder system for position actual value, one per
motor revolution)
• Touch probe (signal edge at corresponding touch-probe input of PLC)
• A preliminary stop position can be set via a homing switch. In this case, home will be the
next zero position of the actual value encoder on the motor or the next touch probe
(depending on the selected mode).
Figure 11: Control signals for homing