16 vartorqueprecontrol, Vartorqueprecontrol -32, Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 200: Appendix
Cross Cutter
Appendix
Prepared Solution Servo PLC / ECSxA 1.1 EN
6-32
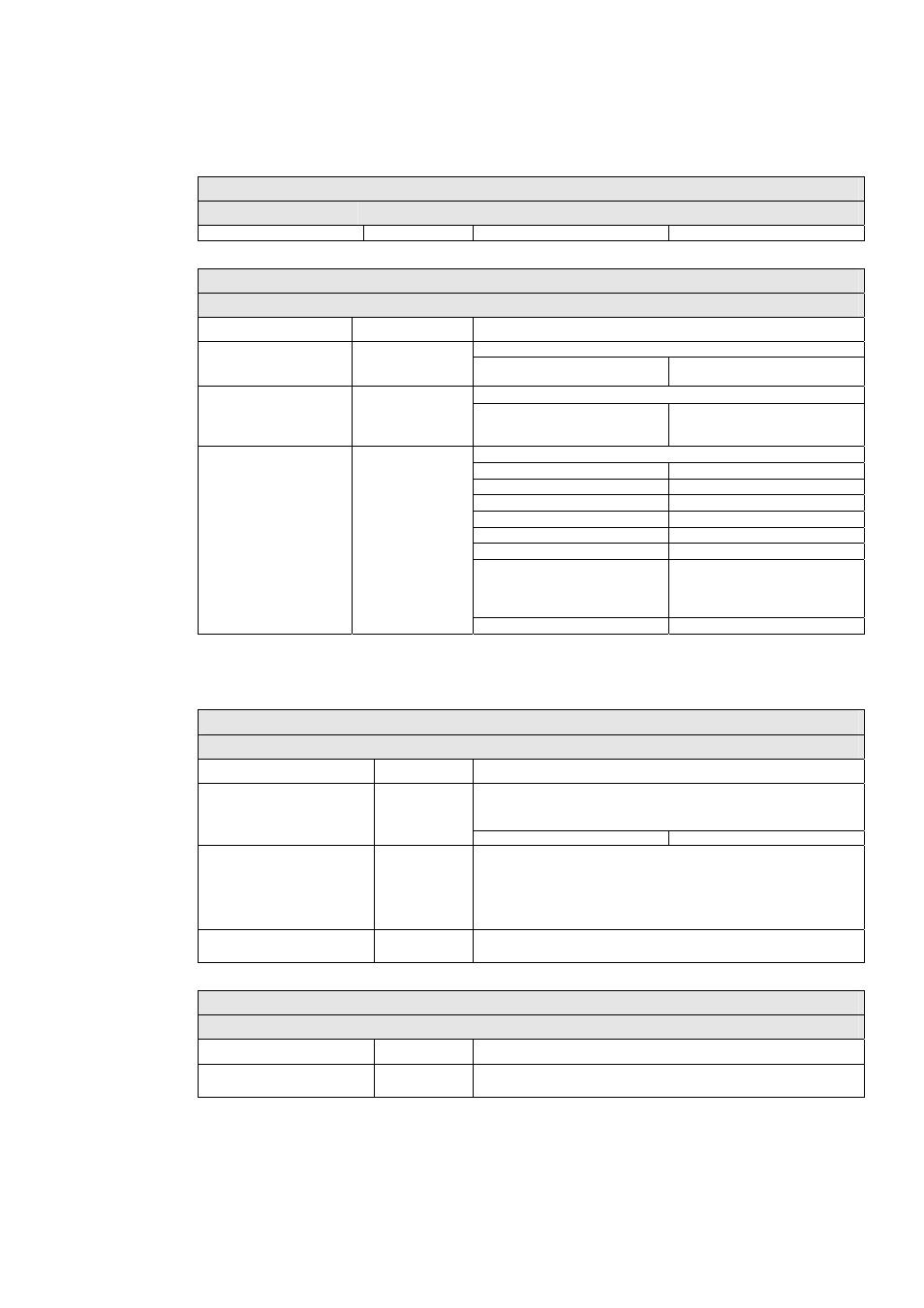
Inputs
Global variables
(Variable type: VAR_GLOBAL)
quick stop (QSP).
Outputs
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
"Traversing to X position on motion profile active" status signal
g_bLockToCamBusy BOOL
TRUE
Moves the drive to the corresponding
position on the motion profile.
"X position on motion profile reached" status signal
g_bLockToCamDone BOOL
TRUE
The drive has arrived at the
corresponding position on the motion
profile.
Display indicating the main states of the template
100 "Init"
state
51 "LockToCamBusy"
state
50 "CamOperation"
state
40 "PositioningOperation"
state
30 "HomingOperation"
state
20 "ManualOperation"
state
10 "StandBy"
state
Switching over to other states is
performed from this initial state.
g_byOperationState BYTE
1 "Trouble"
state
6.1.16 VarTorquePrecontrol
Inputs
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
Enable acceleration precontrol.
•
External torque precontrol remains enabled even when acceleration
precontrol is disabled.
g_bTorquePrecontrolEnable
BOOL
TRUE
Acceleration precontrol enabled.
g_nFactorInertia_a
INT
Factor for adapting the precontrol value to the moment of inertia of the
drive
•
Value range: −32767 ... 32767
•
16384 = 100%
•
The variable is a retain variable.
g_nTorquePreAdd_a
INT
External torque precontrol
•
Remains activated even when acceleration precontrol is deactivated.
Outputs
Global variables
(Variable type: VAR_GLOBAL)
Name Data
type
Value/Meaning
g_nSetTorquePrecontrol_a
INT
Resulting precontrol for torque controller
•
16384 = 100%