2 application error messages, Application error messages -65, Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 233: Appendix
Cross Cutter
Appendix
Prepared Solution Servo PLC / ECSxA 1.1 EN
6-65
6.3.2
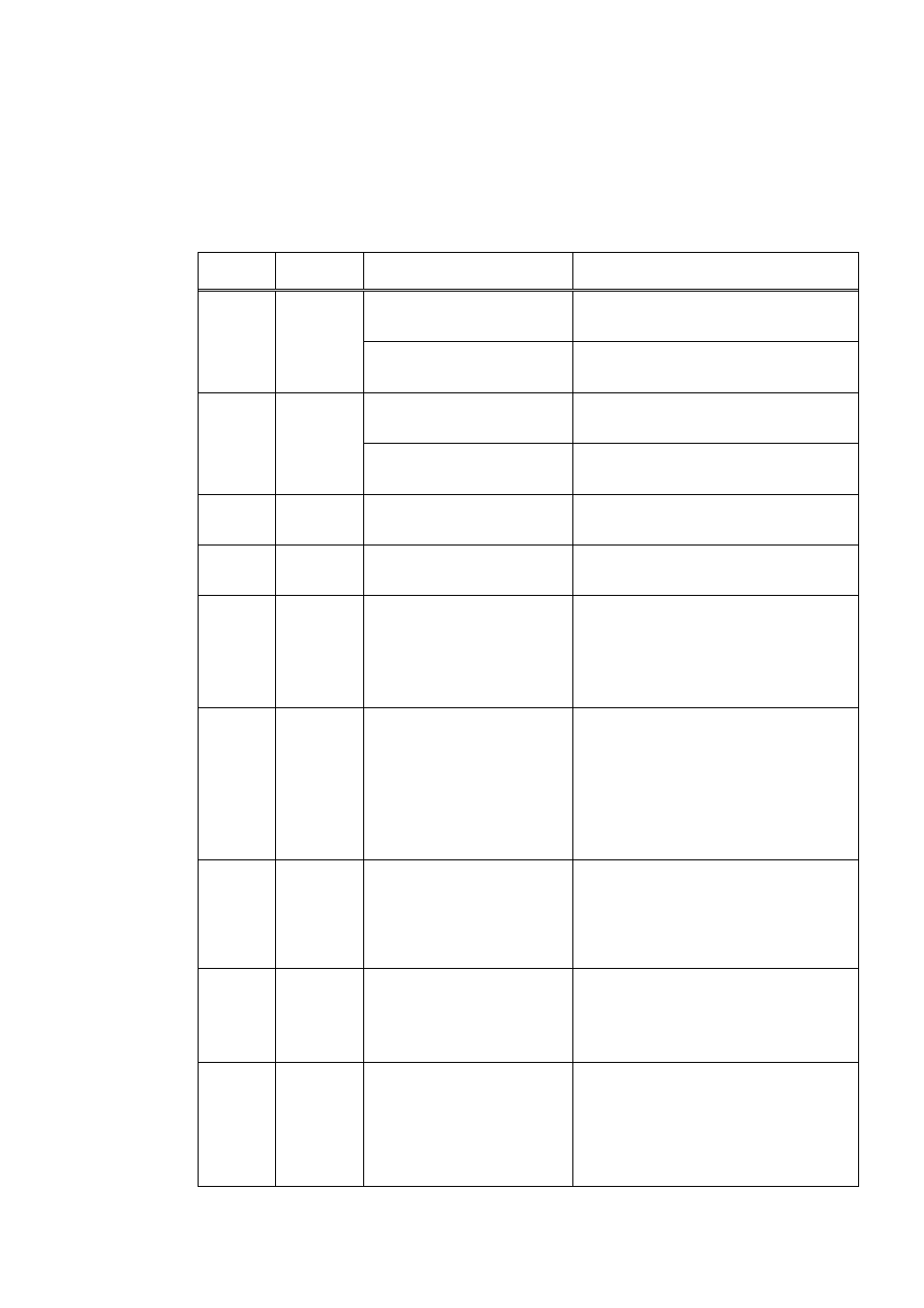
Application error messages
Error
number
Error code
Cause
Remedy
Positive limit switch reached
Retract the positive limit switch:
Acknowledge the error message.
Run the drive in a negative direction, e.g. via manual
jog, until the positive limit switch retracts.
400
PosLimit
Switch
Limit switch signal not connected to
terminal E2
Set the level inversion for digital input I2 to inverse
logic (C0114/002 = 1) or
Establish a permanent wire-bound connection
between terminal I2 and 24 V DC.
401
NegLimit
Switch
Negative limit switch reached
Retract the negative limit switch:
Acknowledge the error message.
Run the drive in a positive direction, e.g. via manual
jog, until the negative limit switch retracts.
Limit switch signal not connected to
terminal E1
Set the level inversion for digital input I1 to inverse
logic (C0114/001 = 1) or
Establish a permanent wire-bound connection
between terminal I1 and 24 V DC.
402
PosSWLimit
Positive software limit position
reached/overtravelled
Run the drive in a negative direction in the
permissible traversing range.
Set the limit value for the positive software limit
position (C3223/000) to a higher value.
403
NegSWLimit
Negative software limit position
reached/overtravelled
Run the drive in a positive direction in the
permissible traversing range.
Set the limit value for the negative software limit
position (C3224/000) to a lower value.
405
FollError
The drive cannot follow the setpoint,
the current following error is greater
than the value set in C3218/001.
-
Increase the current limit in C0022/000, thereby
increasing the torque (CAUTION: Be aware of
the increase in motor temperature!).
-
Reduce the dynamic requirements
(accelerations/decelerations).
-
Increase the following error limit in C3218/001.
-
You may need to check the drive dimensioning.
406
HomError
An attempt has been made to
approach an absolute position
without the measuring system zero
point being known to the drive.
-
Prior to carrying out the first positioning
operation, perform homing (manual
referencing, homing via positioning program)
and/or set the home position in the positioning
program.
-
Define the measuring system zero point for
operation with absolute value encoders.
OR:
-
Select relative positioning if relative positioning
(no absolute measuring system!) is possible.
408
UserQSP
Automatic operation has been
aborted due to a quick stop command
being sent by the user.
-
A quick stop can be triggered via the terminals,
a bus system (AIF or CAN bus) or the control
code C0135/000 (system variable
MCTRL_bQspOut_b
).
-
Reset the quick stop command, acknowledge
the error and perform a controlled reset to
return the drive to the required operating mode.
409
MaxVelConflit
The traversing speed defined in the
positioning profile is generating a
motor speed in excess of the
maximum speed C0011/000.
-
Reduce the speed value in the traversing
profile.
-
Alternatively, increase the maximum speed in
code C0011/000. Take the motor limit speed,
maximum system speeds, etc. into account
when increasing the maximum speed.
410
DriveNotRdy
Automatic operation has been
aborted due to the user setting a
controller inhibit.
-
A controller inhibit can be triggered via
terminal 28, a bus system (AIF or CAN bus),
control codes C0040/000 and C0135/000 or
system variables DCTRL_bCinh1_b and
DCTRL_bCinh2_b
.
-
Re-enable the target system, acknowledge the
error and perform a controlled reset to return
the drive to the required operating mode.