Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 139
Cross Cutter
Installing and starting up the "CrossCutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
3-125
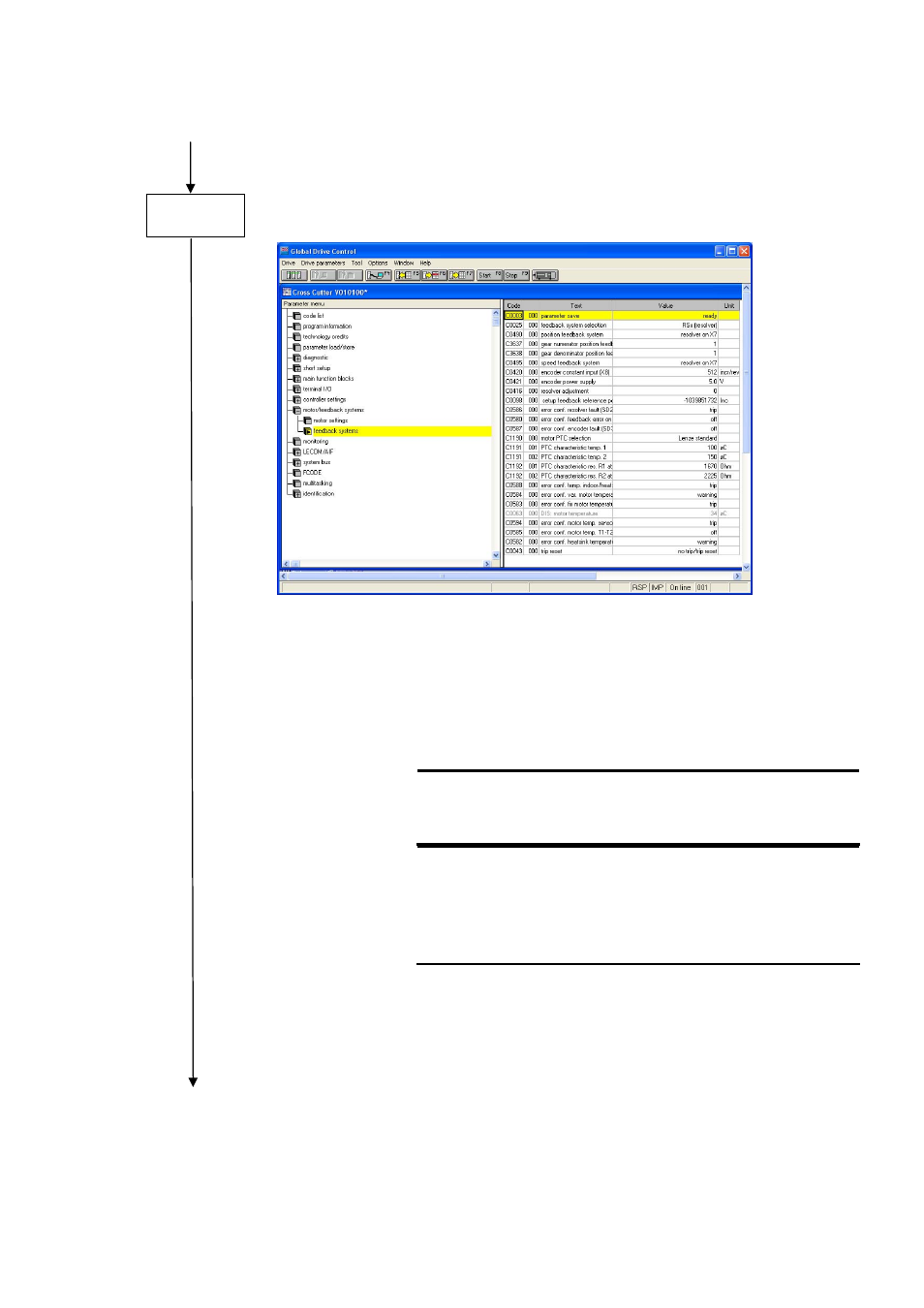
Call up the parameters for configuring the speed and position feedback system
(Motor/Feedback Systems Feedback Systems):
Make the following code settings:
C0490/000 Setting
feedback
system position control
C0495/000 Setting
feedback system speed control
C0420/000 Number of encoder increments when using TTL incremental encoders at X8 or
number of periods on sincos encoders at X8
C0421/000 Setting of supply voltage of feedback system at X8
In addition, in the case of separate position and speed feedback:
C3637/000 Gearbox (numerator) position feedback (see Chapter 2.5.16)
C3638/000 Gearbox (denominator) position feedback (see Chapter 2.5.16)
Caution!
For applications with position feedback on the load side, please note that the position
encoder must rotate in the same direction as the speed sensor!
Caution!
If you use the ECS Sytem: With the Parameterisable variant it is not possible to use
an absolute encoder because this encoder type uses the same input X8 as the
frequency cuppling via DFIN. If an absolute encoder is necessary in the application
the user has to use the programmable version of the prepared solution Cross Cutter
and have to handle the absolute encoder on its own.
Step 3