Variable names, Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 107
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-93
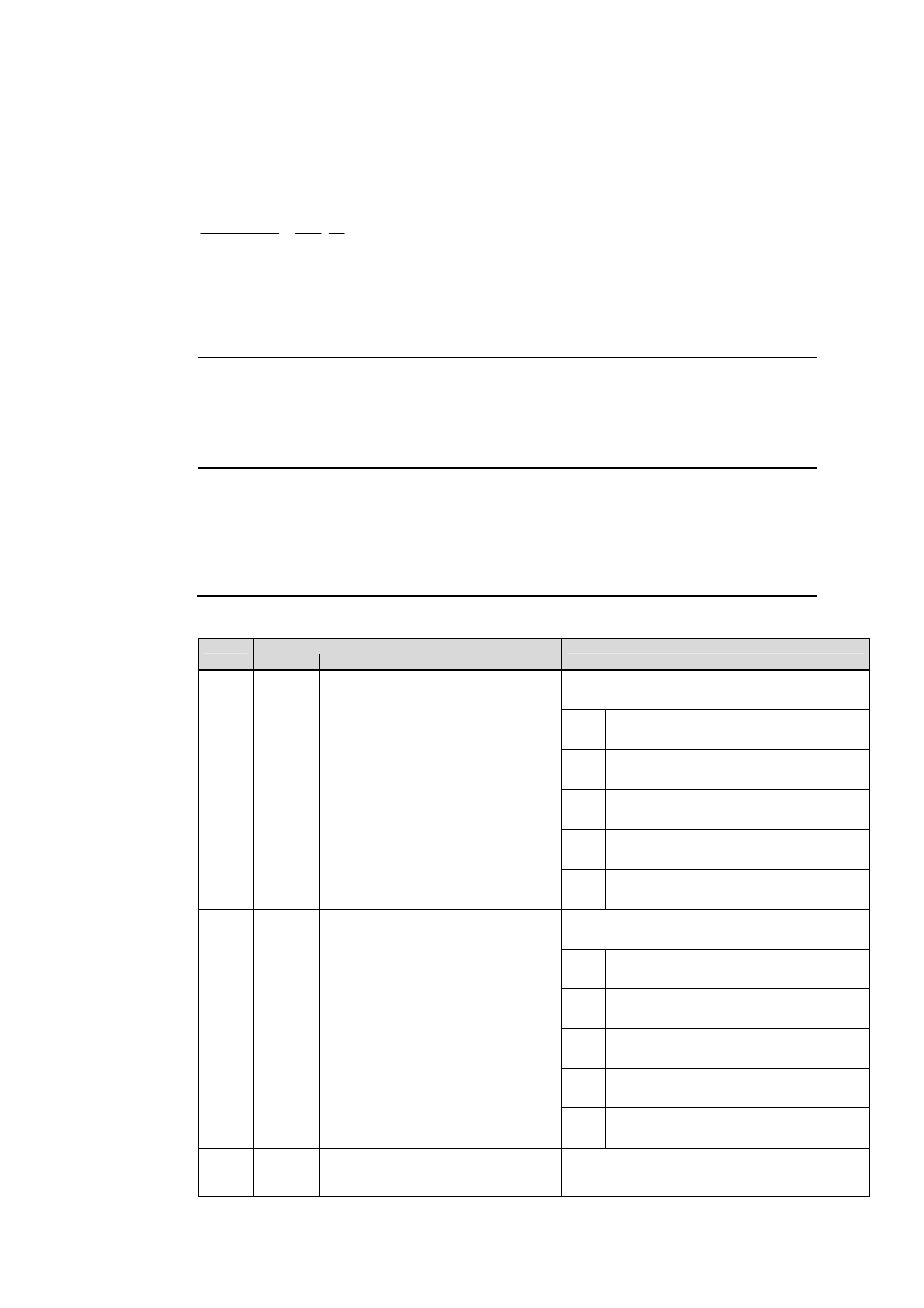
The following formula can be used to calculate scaling factors for load-side mounting of position
feedback (see Figure 39):
hrung
Lagerückfü
ktor
Getriebefa
2
ckführung
Drehzahlrü
ktor
Getriebefa
1
hrung
Lagerückfü
nstante
Vorschubko
2
1
ckführung
Drehzahlrü
nstante
Vorschubko
1
1
2
1
1
2
000
/
3638
000
/
3637
=
=
=
⋅
=
=
⋅
=
⋅
=
i
i
d
vk
d
vk
i
i
vk
vk
C
C
π
π
Caution!
For applications with position feedback on the load side, please note that the position
encoder must rotate in the same direction as the speed sensor! If there is not the same
rotating direction of the feedback systems the rotating direction must be changed with
codenumber C3637 by setting a negativ value.
Caution!
If you use the ECS Sytem: With the Parameterisable variant it is not possible to use an
absolute encoder because this encoder type uses the same input X8 as the frequency
cuppling via DFIN. If an absolute encoder is necessary in the application the user has to
use the programmable version of the prepared solution Cross Cutter and have to handle
the line feedback for example via CAN on its own.
Variable
names
Possible settings:
Code
Default
Selection
Comment
Feedback system for the position controller
0
Resolver at X7
1
TTL encoder at X8
2
Sin/cos encoder at X8
3
ST absolute value encoder at X8
C0490/
000
0 0….
{1}
….4
4
MT absolute value encoder at X8
Feedback system for the speed controller
0
Resolver at X7
1
TTL encoder at X8
2
Sin/cos encoder at X8
3
ST absolute value encoder at X8
C0495/
000
0 0….
{1}
….4
4
MT absolute value encoder at X8
C3637/
000
1 -32767
{1}
...
32767
Gearbox (numerator) position feedback
It is not allowed to set the value Zero!