15 torque precontrol, Torque precontrol -87, Cross cutter – Lenze EVS93xx CrossCutter User Manual
Page 101: Features of the "cross cutter" prepared solution, B) with torque precontrol
Cross Cutter
Features of the "Cross Cutter" prepared solution
Prepared Solution Servo PLC / ECSxA 1.1 EN
2-87
2.5.15 Torque
precontrol
In accordance with the signal flow and the dynamic requirements of the drive, in addition to the
generation of the speed precontrol value and the following error, torque precontrol can
significantly improve the dynamic characteristics of the drive. This is achieved by relieving the
load on the speed controller in system block MCTRL in accordance with the following principle:
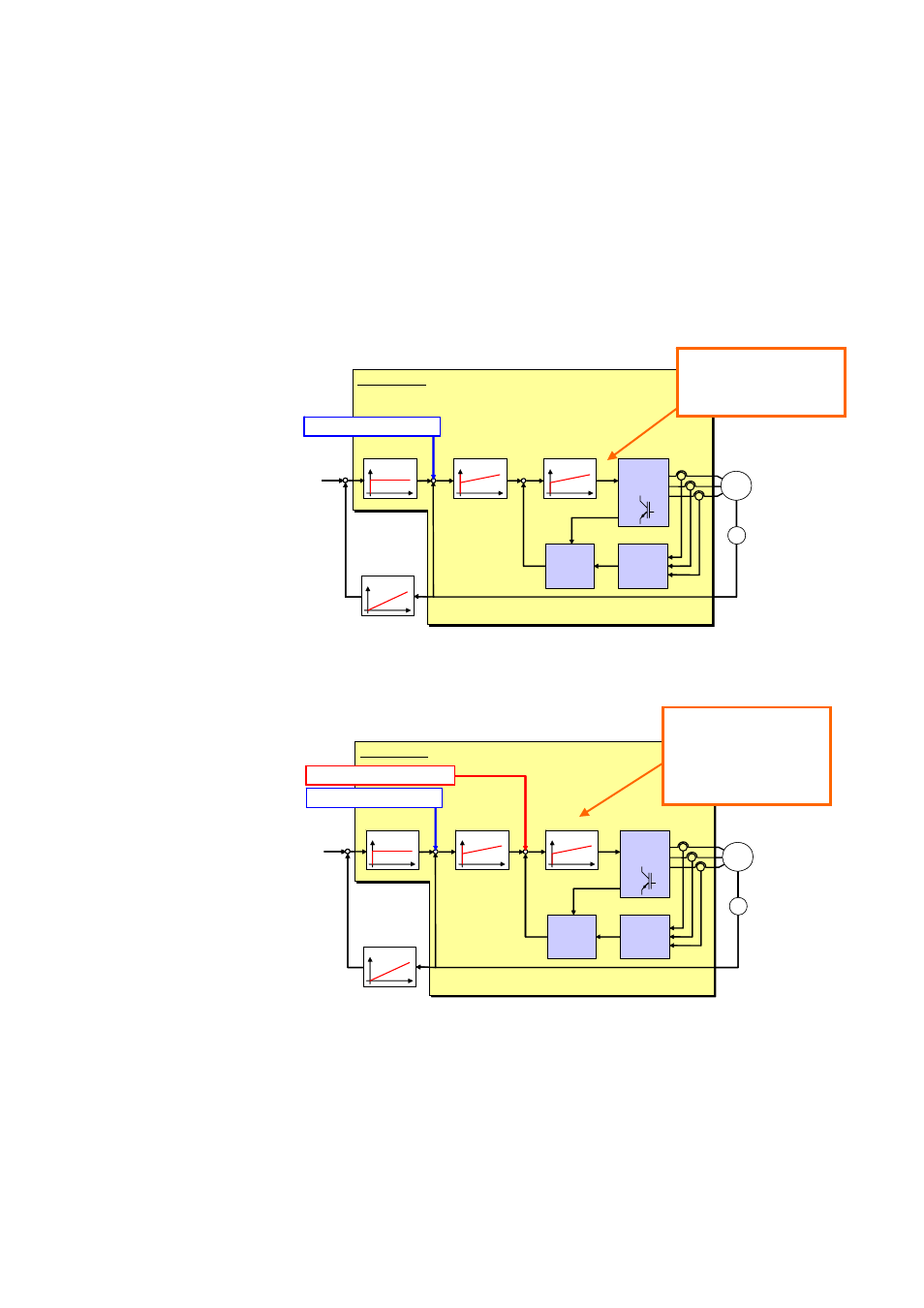
a) Without torque precontrol:
Motor control
I element
Actual value
generation
Motor
model
Torque
controller
PI controller
-
Torque actual
value
+
PID controller
Speed
controller
-
Actual
speed
value
+
P controller
Position
controller
Position
setpoint
+
-
Position
actual
value
Actuator
IGBT
module
R
M
Current
detection
Speed precontrol value
+
Motor control
Motor control
I element
Actual value
generation
Motor
model
Torque
controller
PI controller
PI controller
-
Torque actual
value
+
PID controller
PID controller
Speed
controller
-
Actual
speed
value
+
P controller
P controller
Position
controller
Position
setpoint
+
-
Position
actual
value
Actuator
IGBT
module
R
M
Current
detection
Speed precontrol value
Speed precontrol value
+
b) With torque precontrol:
Motor control
I element
Actual value
generation
Motor
model
PI control
-
Torque actual
value
+
PID control
-
Actual
speed
value
+
P control
+
-
Actuator
IGBT
module
R
M
Current
detection
Speed precontrol value
Torque precontrol value
+
+
Torque
controller
Speed
controller
Position
controller
Position
setpoint
Position
actual
value
Motor control
Motor control
I element
Actual value
generation
Motor
model
PI control
PI control
-
Torque actual
value
+
PID control
PID control
-
Actual
speed
value
+
P control
P control
+
-
Actuator
IGBT
module
R
M
Current
detection
Speed precontrol value
Speed precontrol value
Torque precontrol value
Torque precontrol value
+
+
Torque
controller
Speed
controller
Position
controller
Position
setpoint
Position
actual
value
The more accurately the torque precontrol signal is able to map the actual torque, the more the
load on the speed controller will be relieved and the better the dynamic characteristics of the
drive will be.
The setpoint for the
torque controller is
generated solely via the
speed controller.
The setpoint for the
torque controller is
provided by adding
together the torque
precontrol value and the
speed controller's output