Aborting of operation 1 (canc) – IAI America XSEL-QX User Manual
Page 423
399
Appendix
16. Aborting of Operation 1 (CANC)
Description
Use a declarative command CANC to cause the moving axis to decelerate a stop and cancel the
remaining operation of the axis.
How to Use
While CANC is input, all movement commands issued in the same program are paused are aborted.
CANC command
CANC
20
Abort the movement command in the middle when input port 20 turns ON.
(Declaration)
:
MOVP 1
MOVP 2
:
WTON 21
:
* Declare this command in a step before a movement command.
* While CANC is input, all operation commands are cancelled one by one, but non-operation commands
(such as I/O processes and calculation processes) are performed according to the specified sequence.
Caution
Since which program step is currently executed becomes indeterminable, it is recommended that a WTON
command be used to create a step to wait for input.
Application
With a CANC command, you can select a desired pattern of input signal by using operand 2.
0 = Contact a (Deceleration to a stop)
Same as when operand 2 is not specified
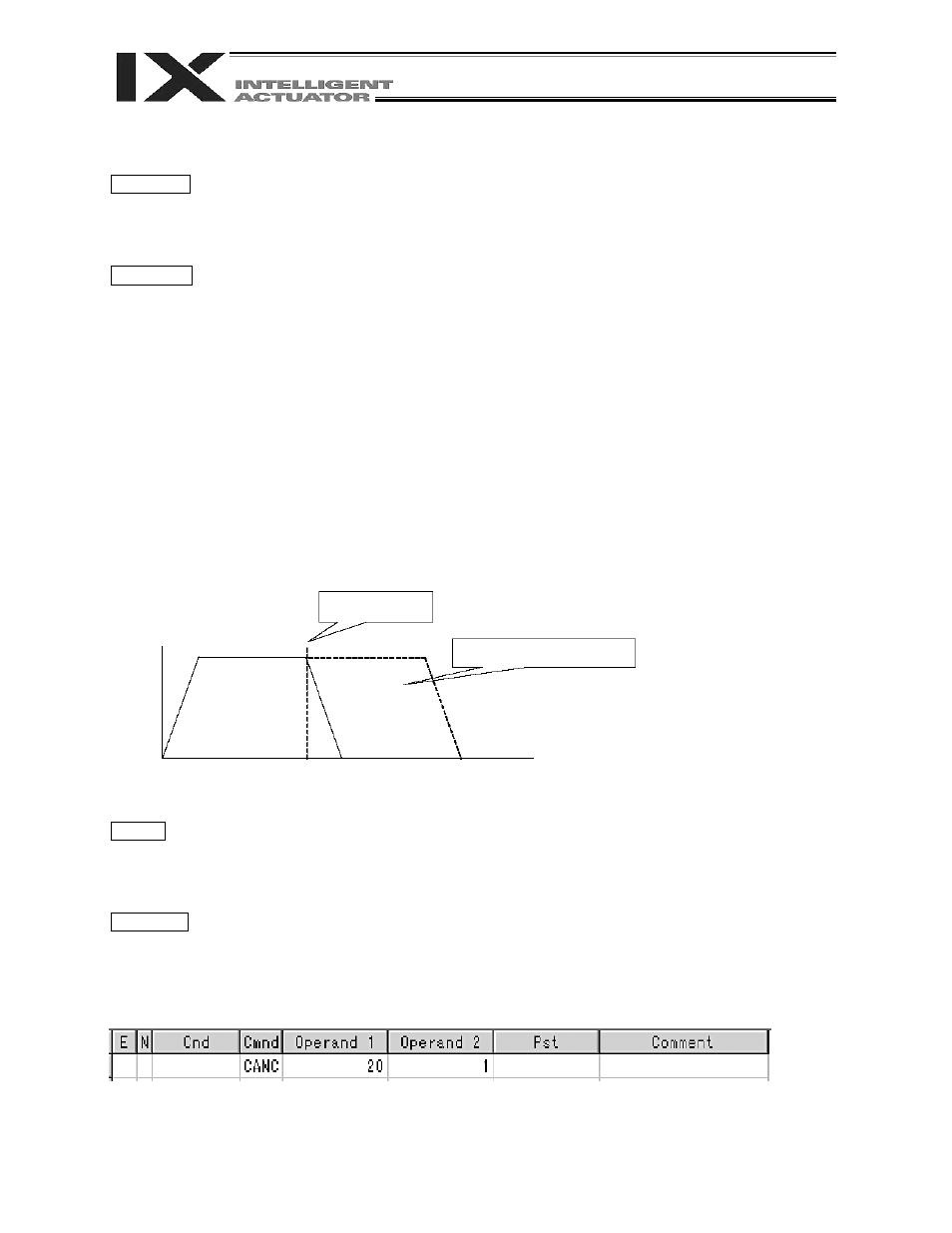
1 = Contact b (Deceleration to a stop)
Input port 20 ON
Remaining
operation
Time
o
Speed
o
This operation is cancelled.
Cancellation input: 20 = Contact b