IAI America XSEL-QX User Manual
Page 378
354
Part 4 Commands
7. Horizontal move optimization function based on Z position for SCARA Robot
Certain models such as the high-speed SCARA robot IX-NNN5020H can use the Horizontal move
optimization function based on Z position for SCARA.
(Note) Conventional models such as IX-NNN5020 cannot use the Horizontal move optimization function
based on Z position for SCARA (“D8A: Optimal acceleration/deceleration, Horizontal move optimization
function based on Z position internal parameter error” will generate).
7.1 Function Overview
Horizontal move optimization function based on Z position for SCARA robot is a function to optimize the
horizontal move conditions based on the Z-axis position and tip load mass of the applicable SCARA robot.
This function is enabled or disabled using all-axis common parameter No. 51. To change the value set in
this parameter, write a desired parameter value to the flash ROM and then perform a software reset or
reconnect the power.
If the horizontal move optimization function for SCARA is enabled, the tip load mass of the SCARA robot
must be set using a WGHT command. Set an appropriate load mass according to the load, etc.
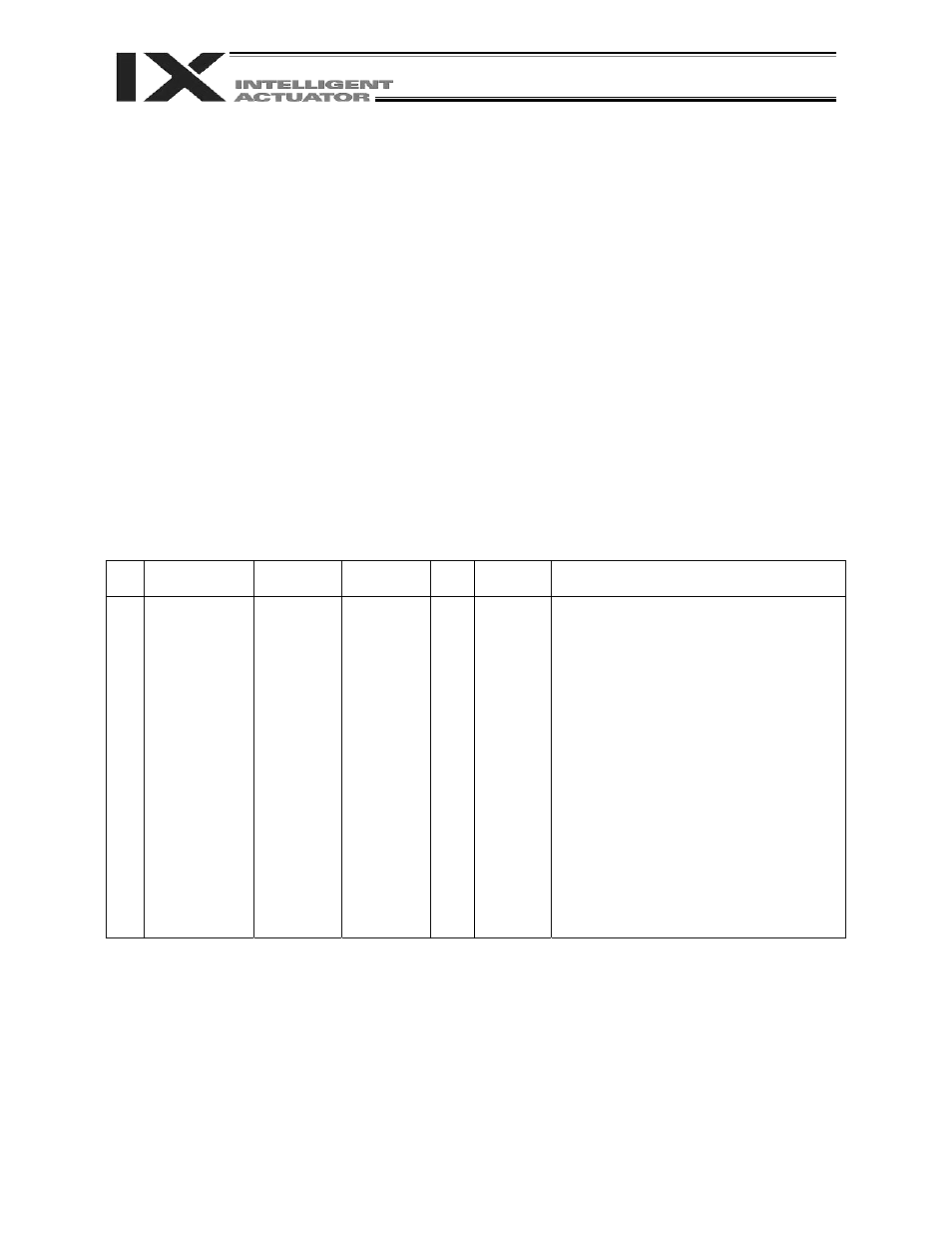
z All-axis common parameters
No.
Parameter
name
Default
(reference)
Input range Unit
Access
right
Remarks
51
SCARA axis
control 1
0H
0H ~
FFFFFFFF
H
F
Bits 8 to 11: Z position
Æ horizontal
move optimization for SCARA (PTP)
(0: Disable
1: Enable)
(Available only on high-speed SCARA
robots of main application version 0.45
or later.)
Bits 12 to 15: Z position
Æ horizontal
move optimization for SCARA (CP)
(0: Disable
1: Enable)
* It is recommended to disable this
function if CP operation must be
performed at a constant speed with
accurate locus and the set speed must
be reached.
(Available only on high-speed SCARA
robots of main application version 0.45
or later.)
* The WGHT command is supported by main controller application version 0.45 or later.
It is valid in PC software version 7.5.0.0 or later and teaching pendant version 1.11 or later.