Yaskawa FSP Amplifier FlexWorks User Manual
Page 27
The Main Screen Interface
27
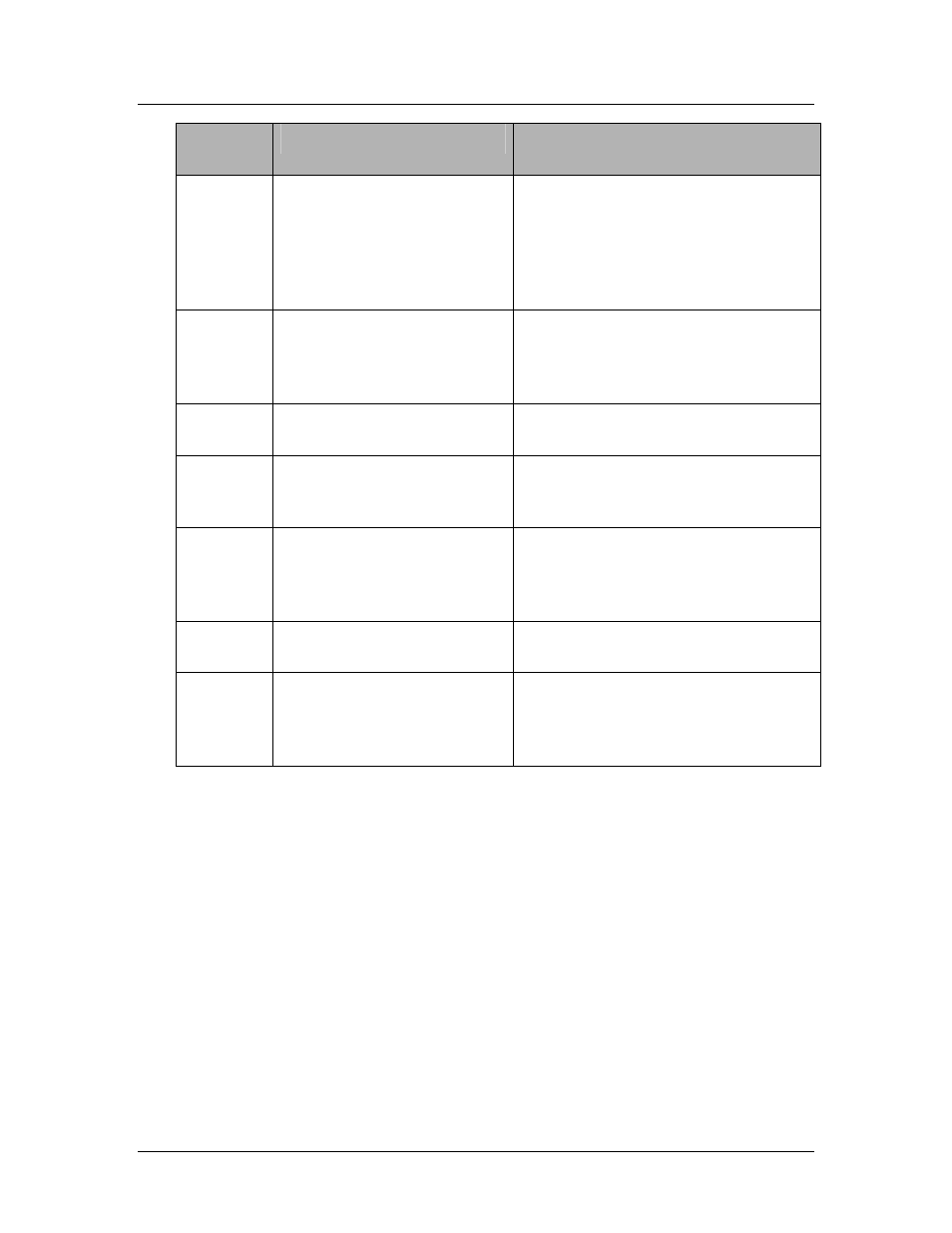
G
ROUP
D
ESCRIPTION
I
NCLUDED
C
OMMANDS
(
EXAMPLES
)
Motion
Controls motor motion.
GO, GO_D, GO_H, MOVE,
MOVE_D, MOVE_H, MOVE_R,
SLIDE, SLIDE_ANALOG,
SPEED_CONTROL, START,
STOP_EX, TORQUE,
TORQUE_ANALOG
Motion
Profile
Changes the default
values of speed,
acceleration and jerk
time.
ACCELERATION, JERK_TIME,
SPEED
Output
Sets output ON/OFF.
FAST_OUTPUT_SETTING,
SET_OUTPUT, SET_OUTPUTS;
Program
Flow
Control
Program flow handling
commands.
CALL, END, GO_TO, IF,
IF_INPUT, INPUT_CASE, LABEL,
LOOP, RETURN, RUN
System
Enables and disables
SERVO control in the
program. Sets gain and
torque limits.
CONTROL, GAIN,
TORQUE_LIMITS
Variables Sets variable values in
the program.
MATH, READ_FROM_ARRAY,
SET_VAR, WRITE_TO_ARRAY
Wait
Delays program flow,
either for a specified time
or until a condition is
met.
DELAY, WAIT_EXACT,
WAIT_FOR_START,
WAIT_INPUT, WAIT_STOP,
WAIT_VAR